IE3036 - Sistemas de Control 1
2do ciclo, 2024
Lección 7: Retroalimentación negativa y control proporcional
¿Por qué?
+
-
C(s)
G(s)
H(s)
R(s)
Y(s)
Sistema de control canónico
+
-
C(s)
G(s)
H(s)
R(s)
Y(s)
Nos hemos enfocado en el modelado y análisis de la planta
+
-
C(s)
G(s)
H(s)
R(s)
Y(s)
Objetivo principal del sistema de control: forzar que la planta se comporte de una manera deseada.
+
-
C(s)
G(s)
H(s)
R(s)
Y(s)
¿Qué hace el controlador? ¿Qué es el control en sí?
Antes de contestar eso, estudiemos el fenómeno de retroalimentación negativa.
Retroalimentación negativa
+
-
referencia
planta
sensor
controlador
salida
retroalimentación negativa
+
-
referencia
salida
retroalimentación negativa
planta
sensor ideal
¿Por qué retroalimentación negativa?
Veamos algunos ejemplos...
Modelo ideal del amplificador operacional.
El modelo más inestable en circuitos electrónicos.
Estabilidad
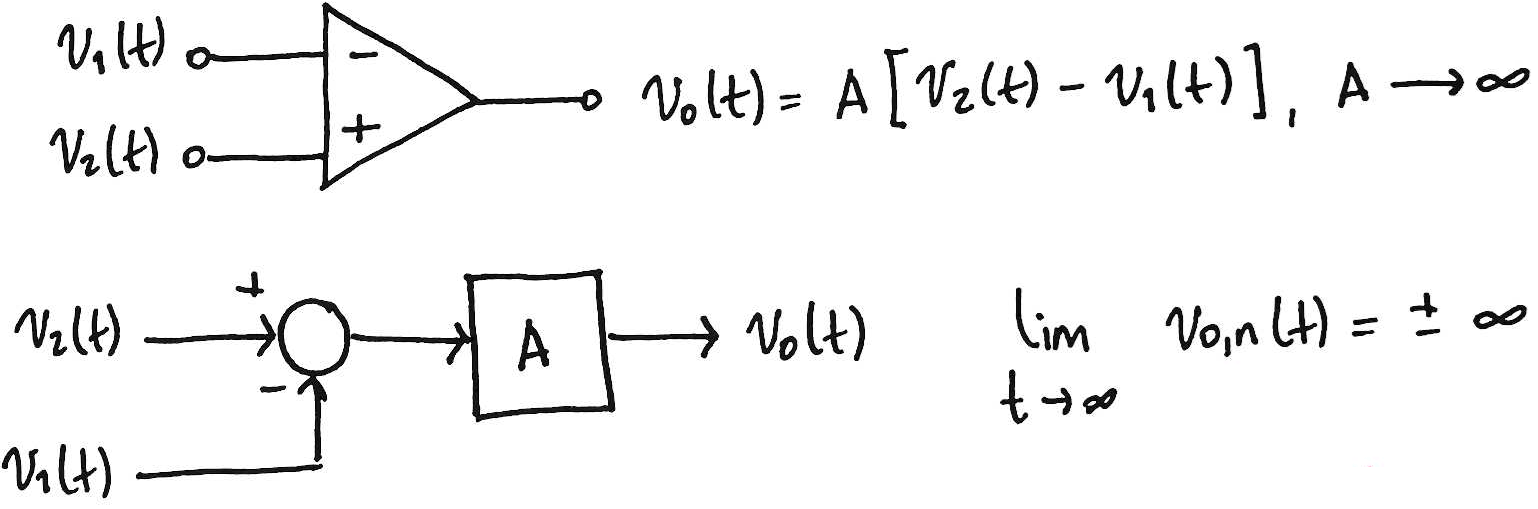
Lazo abierto
Respuesta natural
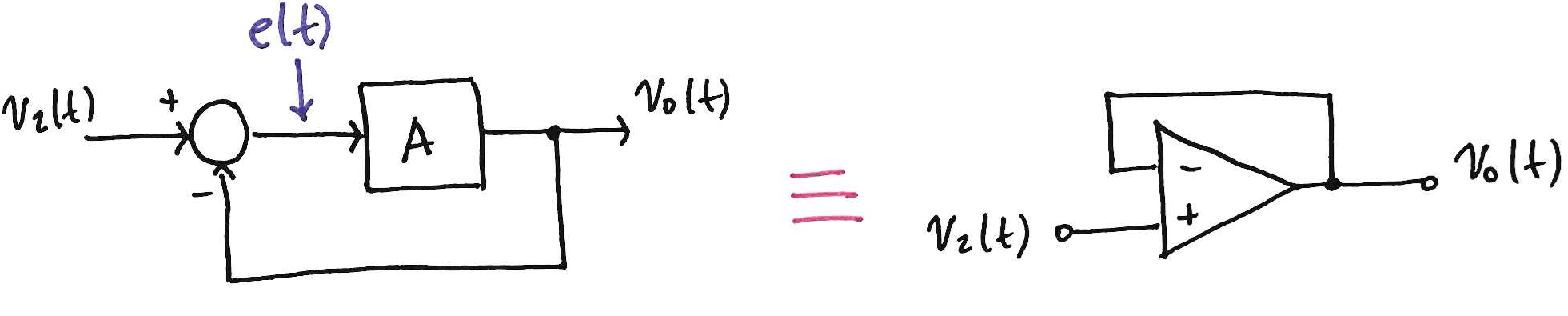
¿Qué pasa si cerramos el lazo?
V_2(s)
\frac{A}{1+A}
V_o(s)
Seguidor de voltaje
\lim_{A\to\infty}\frac{A}{1+A}=\lim_{A\to\infty}\frac{1}{1}=1
\frac{V_o(s)}{V_2(s)}=G(s)=1
¿Qué pasa si cerramos el lazo?
V_2(s)
\frac{A}{1+A}
V_o(s)
V_2(s)
1
V_o(s)
g(t)=\mathcal{L}^{-1}\{1\}=\delta(t)
\lim_{t\to\infty}V_{o,n}(t)\equiv \lim_{t\to\infty} g(t)=0
Seguidor de voltaje
Otra forma de analizar la situación:
veamos el error en estado estacionario, \(e_{ss}\), con \(V_2(t)=\textbf{1}(t)\).
(1+A)E(s)=\mathrm{V}_2(s) \quad \Rightarrow \quad E(s)=\frac{\mathrm{V}_2(s)}{1+A}=\frac{1}{s(1+A)}
E(s)=\mathrm{V}_2(s)-\mathrm{V}_o(s)=\mathrm{V}_2(s)-AE(s)
e_{ss}=\lim_{t\to\infty}e(t)=\lim_{s\to 0}sE(s)=\lim_{s\to 0} \frac{1}{1+A}=\frac{1}{1+A}
Como \(A\rightarrow \infty\),
e_{ss}=\lim_{A\to\infty} \frac{1}{1+A}=0
Conclusión: la retroalimentación negativa fue capaz de estabilizar un sistema que originalmente era inestable.
Modelo de un motor AC lento.
Rendimiento
G(s)=\frac{Y(s)}{U(s)}=\frac{0.01}{s+0.01}
\tau=\frac{1}{\sigma}=\frac{1}{0.01}=100 s
Modelo de un motor AC lento.
reducción del 50% del valor original
\tau=\frac{1}{\sigma}=\frac{1}{0.02}=50 s
\Rightarrow
R(s)
Y(s)
\frac{0.01}{s+0.02}
+
-
R(s)
Y(s)
\frac{0.01}{s+0.01}
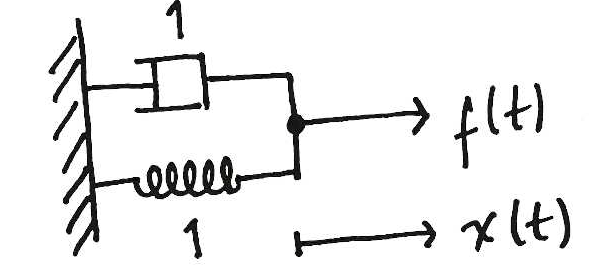
Sensibilidad a errores de modelado
G(s)=\frac{Y(s)}{U(s)}=\frac{\alpha}{s+1}, \alpha>0
Y(s)=G(s)U(s)=\frac{\alpha}{s(s+1)}=\frac{\alpha}{s}-\frac{\alpha}{s+1}
¿Valor final con entrada de escalón unitario?
y_{ss}=\lim_{s\to 0}sY(s)=\lim_{s\to 0}\frac{\alpha}{s+1}=\alpha \triangleq y_{ss}^{ol}
open loop
¿Valor final al cerrar el lazo?
\Rightarrow
R(s)
Y(s)
\frac{\alpha}{s+1+\alpha}
+
-
R(s)
Y(s)
\frac{\alpha}{s+1}
Y(s)=G(s)U(s)=\frac{\alpha}{s(s+1+\alpha)}
y_{ss}=\lim_{s\to 0}sY(s)=\lim_{s\to 0}\frac{\alpha}{s+1+\alpha}=\frac{\alpha}{1+\alpha} \triangleq y_{ss}^{cl}
closed loop
¿Ventaja? Veamos cuál valor final es más sensible.
\delta y_{ss}^{ol} \triangleq \frac{d}{d\alpha}y_{ss}^{ol}=1
siempre es 1
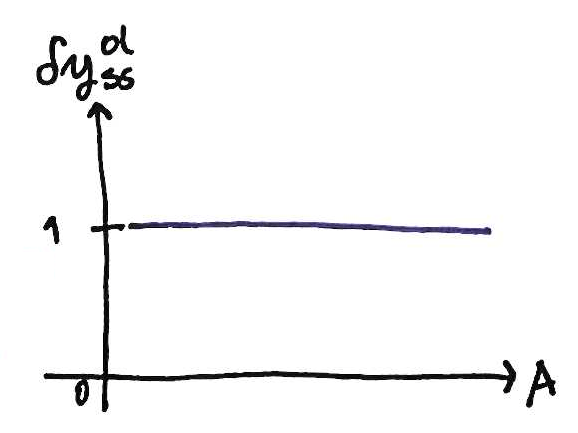
\alpha
¿Ventaja? Veamos cuál valor final es más sensible.
\delta y_{ss}^{ol} \triangleq \frac{d}{d\alpha}y_{ss}^{ol}=1
siempre es 1
\delta y_{ss}^{cl} \triangleq \frac{d}{d\alpha}y_{ss}^{cl}=\frac{1}{(1+\alpha)^2}
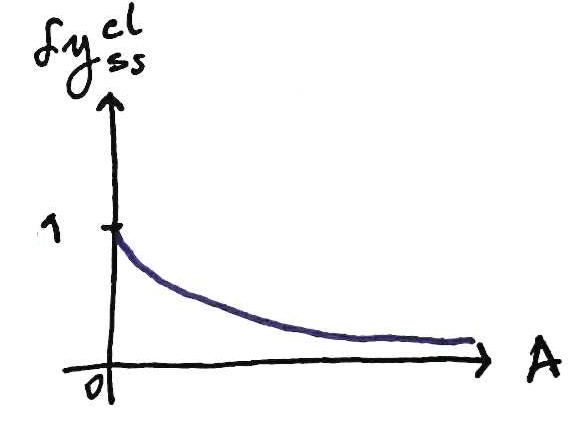
a lo sumo es 1
Menos sensible a errores de modelado
\alpha
\alpha
Rechazo de perturbaciones
\alpha, \beta > 0
Problema importante en sistemas de control, como la regulación y el rastreo de referencias.
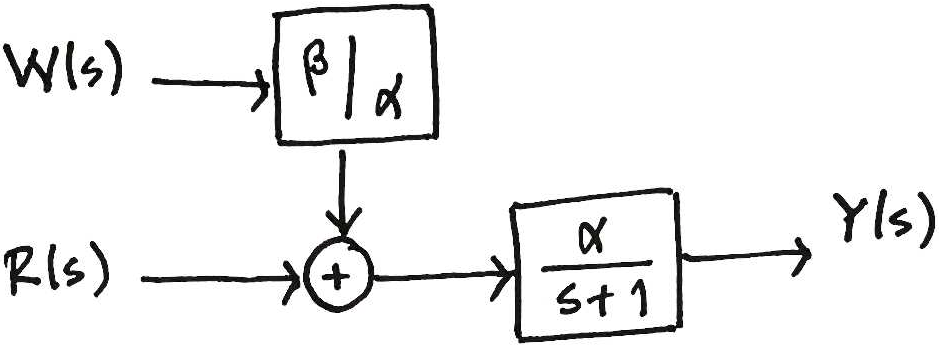
Por superposición:
T(s)=\frac{Y(s)}{R(s)}
con \(W(s)=0\)
T_w(s)=\frac{E(s)}{W(s)}=-\frac{Y(s)}{W(s)}
con \(R(s)=0\)
Y(s)=T(s)R(s)-T_w(s)W(s)
T(s)=\frac{\alpha}{s+1}
y_{ss}^{ol}=\lim_{s\to 0}sY(s)=\lim_{s\to 0}\frac{\alpha}{s+1}sR(s)+\lim_{s\to 0}\frac{\beta}{s+1}sW(s)
T_w(s)=-\frac{\beta}{s+1}
Y(s)=\frac{\alpha}{s+1}R(s)+\frac{\beta}{s+1}W(s)
y_{ss}^{ol}=\alpha r_{ss}+\beta w_{ss}
En lazo cerrado:
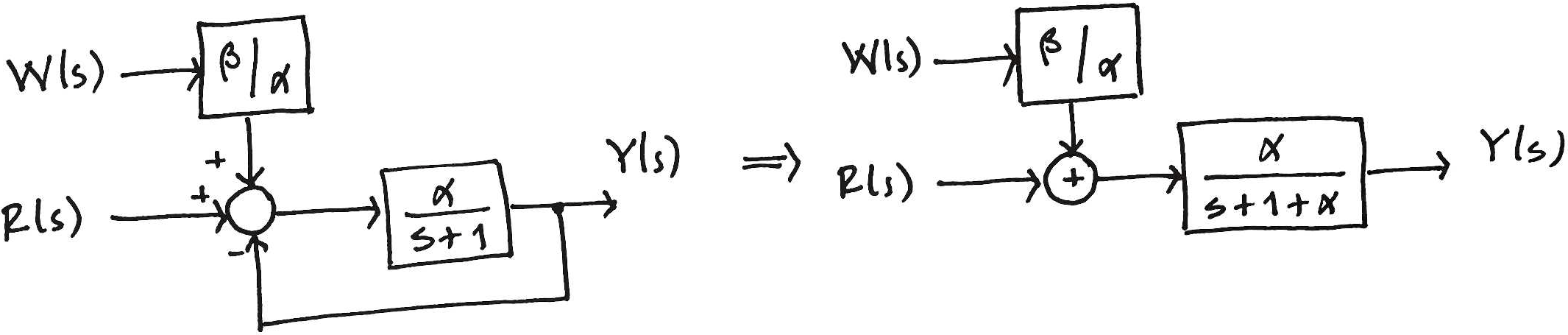
T(s)=\frac{\alpha}{s+1+\alpha}
T_w(s)=-\frac{\beta}{s+1+\alpha}
y_{ss}^{cl}=\lim_{s\to 0}sY(s)=\frac{\alpha}{1+\alpha} r_{ss}+\frac{\beta}{1+\alpha} w_{ss}
Y(s)=\frac{\alpha}{s+1+\alpha}R(s)+\frac{\beta}{s+1+\alpha}W(s)
\frac{\beta}{1+\alpha} w_{ss} < \beta w_{ss}
Notar que:
La perturbación afecta en menor medida al sistema en lazo cerrado.
cerrado abierto
Control proporcional
+
-
K
G(s)
R(s)
Y(s)
E(s)=R(s)-Y(s)
KE(s)
C(s)=K
¿Idea de este controlador?
u(t)=Ke(t)
y(t)
G(s)
u(t)=Ke(t)=K[r(t)-y(t)]
¿Discrepancia entre la salida y la referencia?
¿Idea de este controlador?
u(t)=Ke(t)
y(t)
G(s)
u(t)=Ke(t)=K[r(t)-y(t)]
¿Discrepancia entre la salida y la referencia?
- Si la desviación de lo deseado con lo obtenido es pequeña, el control es pequeño.
- \(K\) hace que las desviaciones grandes sean suficientes para hacer reaccionar rápidamente al sistema.
Ejemplo
Objetivos/requerimientos de control:
a) \(\tau=0.1s\) b) \(e_{ss}=0\) c) a) y b) juntos
+
-
K
R(s)
Y(s)
\frac{1}{s+1}
\frac{K}{s+1+K}
R(s)
Y(s)
Ejemplo
Observaciones:
- No podemos obtener más de un objetivo de control de forma exacta.
- No podemos hacer \(e_{ss}=0\) de forma realista.
¿Qué podemos hacer? \(\Rightarrow\) Emplearemos el llamado controlador Proporcional Integral Derivativo (PID).
IE3036 - Lecture 7 (2025)
By Miguel Enrique Zea Arenales



