Técnicas clásicas de visión por computadora I
MT3006 - Robótica 2
¿Por qué?
Procesamiento a nivel pixel
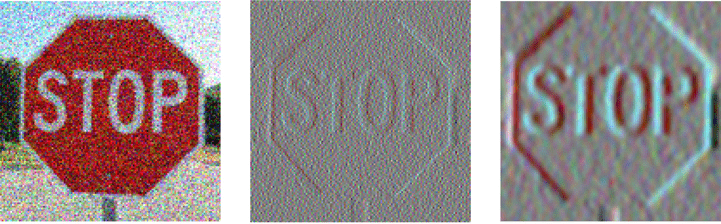
Thresholding

I
J
imagen binaria
(forma una máscara)
Thresholding
I
J
J(u,v)=\begin{cases} 1 & \text{ si } \ I(u,v) \ge \epsilon \\ 0 & \text{ caso contrario } \end{cases}
threshold
Thresholding
I
J
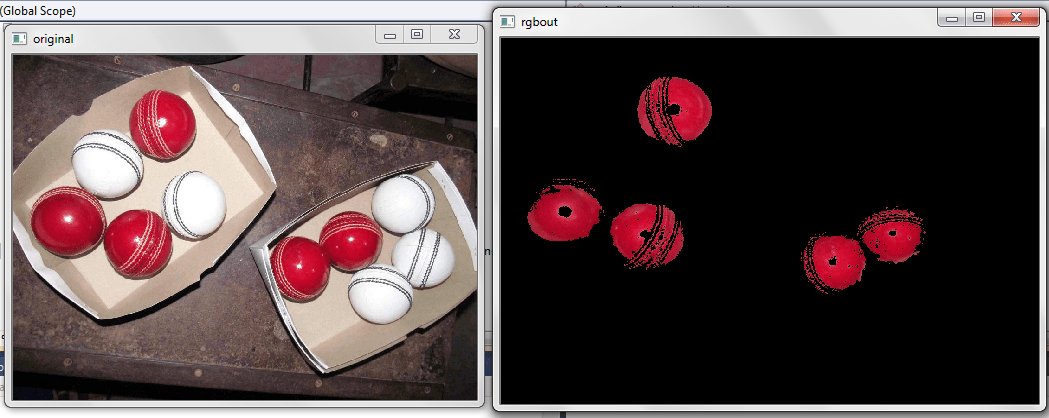
imagen luego de aplicar la máscara de color
Thresholding
I
J
R_{\min}< R < R_{\max} \\
G_{\min}< G < G_{\max} \\
B_{\min}< B < B_{\max}
imagen luego de aplicar la máscara de color
Thresholding
I
J
o bien (por ejemplo)
d = \sqrt{(R-R_0)^2+(G-G_0)^2+(B-B_0)^2}, \quad d < \epsilon
Thresholding
I
J
o bien (por ejemplo)
d = \sqrt{(R-R_0)^2+(G-G_0)^2+(B-B_0)^2}, \quad d < \epsilon
color de interés

Histogramas

Equalización de histograma

Equalización de histograma
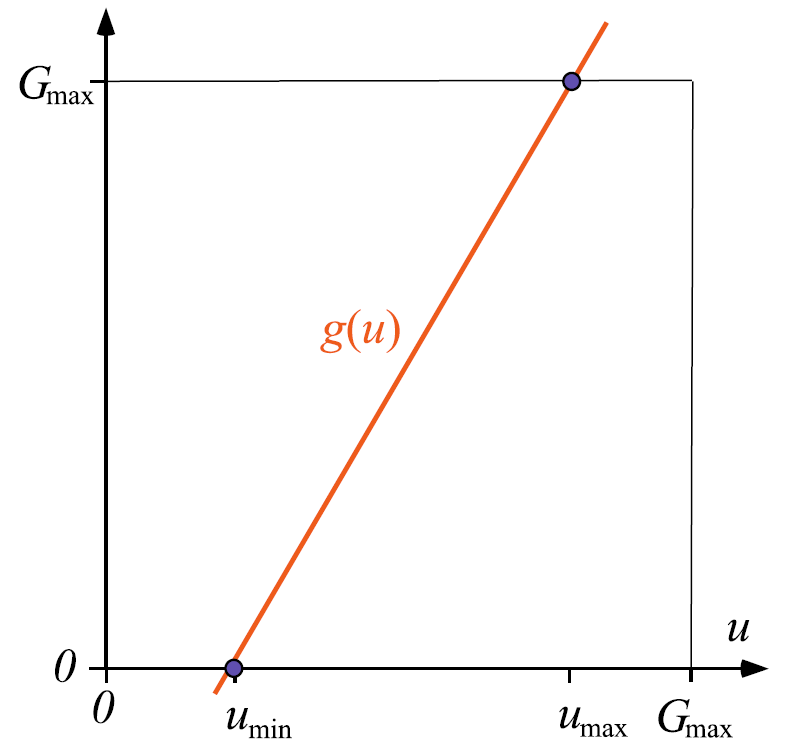
g(I(u,v))
255
255
\min I
\max I
Procesamiento a nivel local
Estadísticas básicas

también aplican a nivel global
Filtrado LTI \(\equiv\) Convolución
W
J[u,v] = I[u,v] * W = \dfrac{1}{S}\displaystyle \sum_{i=-k}^{+k} \sum_{j=-k}^{+k} w_{ij} I[u-i,y-j]

Filtrado LTI \(\equiv\) Convolución
W
J[u,v] = I[u,v] * W = \dfrac{1}{S}\displaystyle \sum_{i=-k}^{+k} \sum_{j=-k}^{+k} w_{ij} I[u-i,y-j]
kernel de \((2k+1)\times(2k+1)\)
factor de escalamiento tal que \(\displaystyle \sum_i \sum_j |w_{ij}|=S\)
Filtrado LTI \(\equiv\) Convolución
W
J[u,v] = I[u,v] * W = \dfrac{1}{S}\displaystyle \sum_{i=-k}^{+k} \sum_{j=-k}^{+k} w_{ij} I[u-i,y-j]
kernel de \((2k+1)\times(2k+1)\)
factor de escalamiento tal que \(\displaystyle \sum_i \sum_j |w_{ij}|=S\)
si el kernel es simétrico entonces
J[u,v] = I[u,v] * W = I[u,v] \star W \\ = \dfrac{1}{S}\displaystyle \sum_{i=-k}^{+k} \sum_{j=-k}^{+k} w_{ij} I[u+i,y+j]
correlación cruzada en 2D
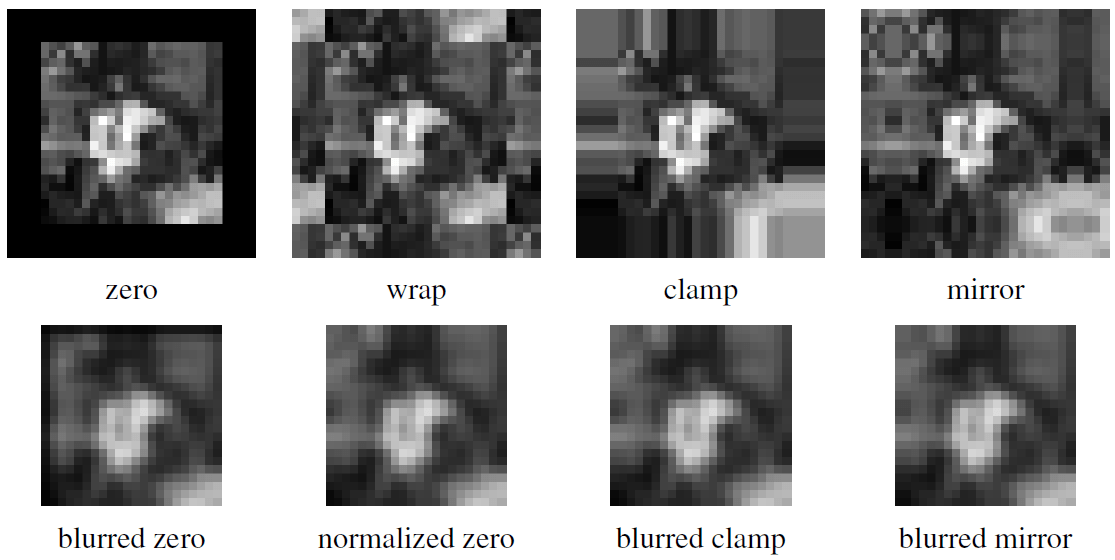
Procedimiento
Padding (efectos en los bordes)
Convolución vs correlación
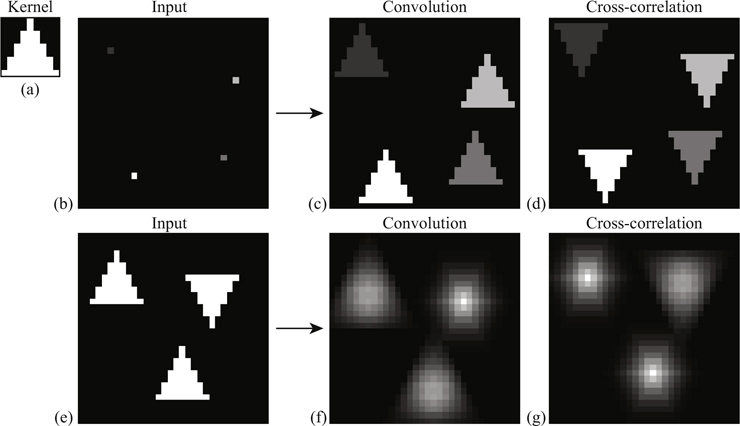
Convolución vs correlación
puede emplearse (normalizada) para hacer template matching
Kernels para suavizado (smoothing)
box filter
W = \dfrac{1}{9}\begin{bmatrix} 1 & 1 & 1 \\ 1 & 1 & 1 \\ 1 & 1 & 1 \end{bmatrix}

ej: \(3\times 3\)
\(S=9\) en este caso
Kernels para suavizado (smoothing)
Gaussian filter
W[u,v; \sigma] = \dfrac{1}{S} \exp{\left(-\dfrac{u^2+v^2}{2\sigma^2}\right)}
bajo esta perspectiva el box filter corresponde a una distribución uniforme, también pueden emplearse otras distribuciones como la binomial
\sigma=0.5
\sigma=1
\sigma=2
\sigma=4
\sigma=8
\sigma=16
Aplicaciones de suavizado
de-noising


remoción de detalles
\(\Rightarrow\) suavizado \(\equiv\) filtrado pasa-bajas
Afilado (sharpening)
operación contraria al suavizado
\(\equiv\) filtrado pasa-altas \(\approx\) resaltado de detalles

W = \begin{bmatrix} 0 & -1 & 0 \\ -1 & 5 & -1 \\ 0 & -1 & 0 \end{bmatrix}
sharpen filter (ejemplo)
puede emplearse suavizado para obtener afilado mediante unsharp masking
J[u,v]=I[u,v]+\lambda R[u,v]=(1+\lambda)I[u,v]-\lambda S[u,v]
R[u,v]=I[u,v]-S[u,v]
factor de escalamiento
versión suavizada de \(I\)
residual:
De detalles a bordes
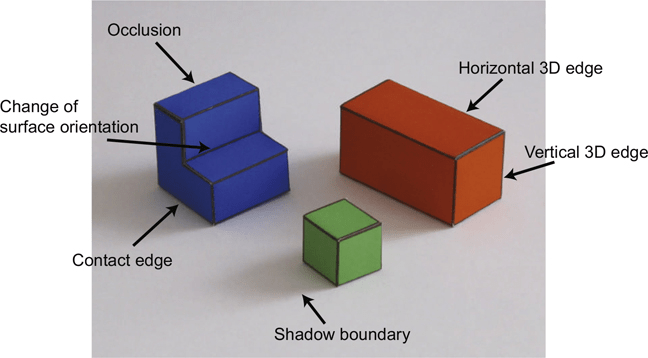

perfiles de intensidad
De detalles a bordes
perfiles de intensidad
discontinuidades \(\Rightarrow\) bordes
entonces pueden emplearse derivadas para detectarlos

\nabla I(u,v)=\displaystyle \begin{bmatrix} \dfrac{\partial I(u,v)}{\partial u} & \dfrac{\partial I(u,v)}{\partial v} \end{bmatrix}^\top
\nabla^2 I=\displaystyle \dfrac{\partial^2 I}{\partial u^2} + \dfrac{\partial^2 I}{\partial v^2}
gradiente
Laplaciano
Kernels para calcular derivadas
\dfrac{\partial I(u,v)}{\partial u}=\lim_{\delta\to 0} \dfrac{I(u+\delta,v)-I(u,v)}{\delta}
en imágenes el \(\delta\) más pequeño es 1, es decir, un pixel
\dfrac{\partial I(u,v)}{\partial u}\approx \dfrac{I(u+1,v)-I(u,v)}{1}
Kernels para calcular derivadas
\dfrac{\partial I(u,v)}{\partial u}=\lim_{\delta\to 0} \dfrac{I(u+\delta,v)-I(u,v)}{\delta}
en imágenes el \(\delta\) más pequeño es 1, es decir, un pixel
\dfrac{\partial I(u,v)}{\partial u}\approx \dfrac{I(u+1,v)-I(u,v)}{1}
\dfrac{\partial I}{\partial u}\approx \begin{bmatrix} 1 & 0 \\ 0 & -1 \end{bmatrix}
\dfrac{\partial I}{\partial v}\approx \begin{bmatrix} 0 & 1 \\ -1 & 0 \end{bmatrix}
kernels de Roberts
Derivadas y ruido
Roberts
Suavizado + Roberts
\(\Rightarrow\) Sobel
Kernels para calcular derivadas
W_x = \dfrac{1}{2} \begin{bmatrix} -1 & 0 & 1 \\ -2 & 0 & 2 \\ -1 & 0 & 1 \end{bmatrix}
W_y = \dfrac{1}{2} \begin{bmatrix} -1 & -2 & -1 \\ 0 & 0 & 0 \\ 1 & 2 & 1 \end{bmatrix}
kernels de Sobel
= derivada con \(\delta=2\) + suavizado con binomial
S_x = I*W_x \\ S_y = I*W_y
\nabla I(u,v) = \begin{bmatrix} S_x(u,v) \\ S_y(u,v) \end{bmatrix}
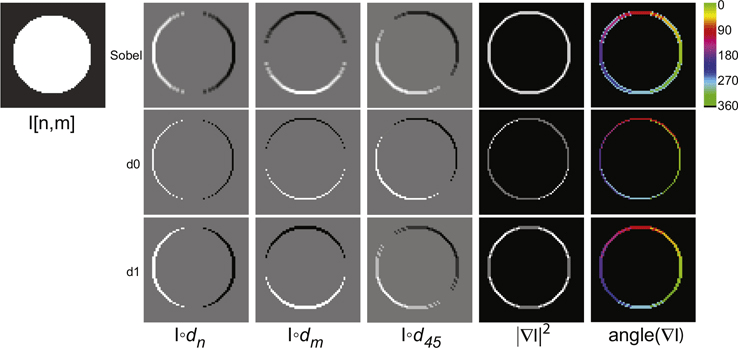
I
S_x
S_y
S_{45°}
|\nabla I|^2
\angle \nabla I
I
S_x
S_y
S_{45°}
|\nabla I|^2
\angle \nabla I
simple y decente, pero con bordes "de más" con diferente intensidad
¿Ideal? Imagen binaria sólo con los bordes más fuertes y con un grosor uniforme \(\Rightarrow\) detector de bordes de Canny
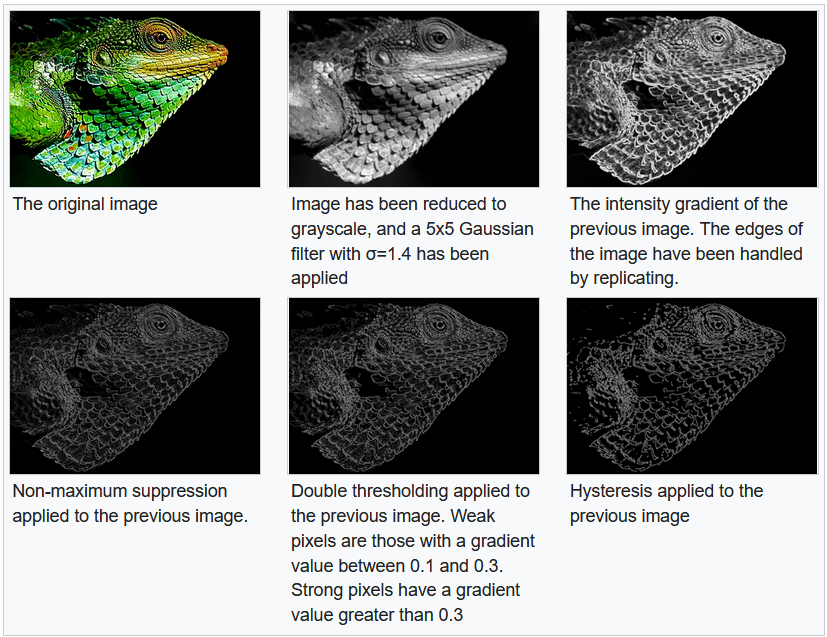
Canny edge detection

Canny edge detection
- Estimación del gradiente de la imagen.
- Se calcula la magnitud y la fase por pixel.
- La fase se aproxima | cuantifica a múltiplos de \(\pi/4\).
- Se realiza una supresión (local) de no-máximos para la magnitud, en la dirección de la fase.
- Se realiza una etapa de seguimiento de borde mediante thresholding e histéresis.
Canny edge detection
- Estimación del gradiente de la imagen.
- Se calcula la magnitud y la fase por pixel.
- La fase se aproxima | cuantifica a múltiplos de \(\pi/4\).
- Se realiza una supresión (local) de no-máximos para la magnitud, en la dirección de la fase.
- Se realiza una etapa de seguimiento de borde mediante thresholding e histéresis.
a pesar de haber detectores de bordes más modernos, el de Canny continúa siendo de los más útlies
Análisis de regiones y extracción (simple) de características
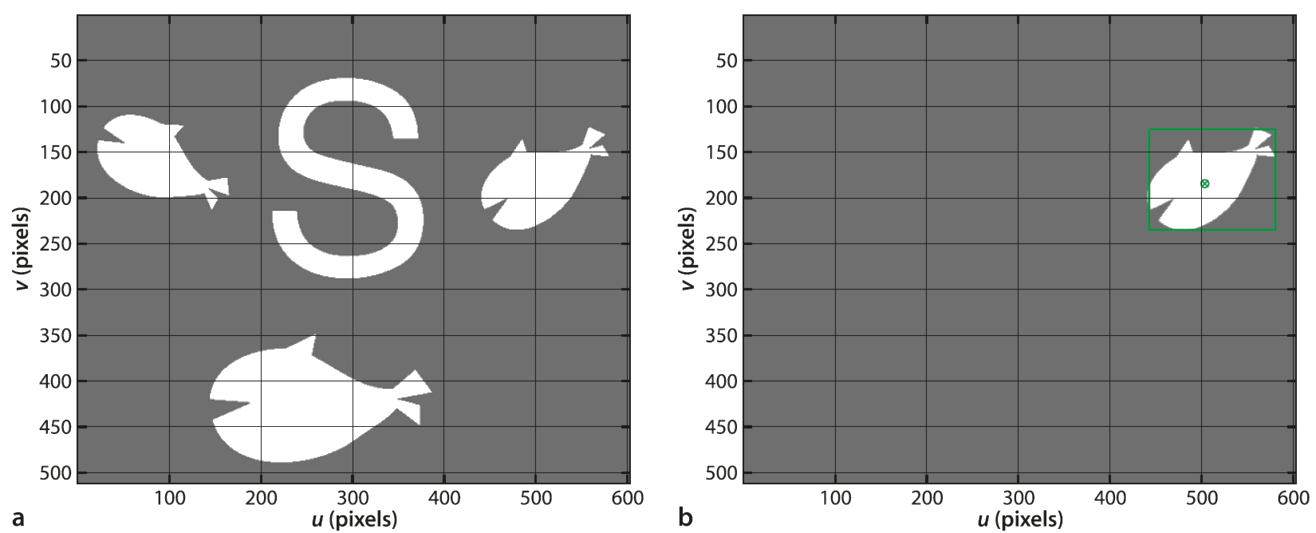
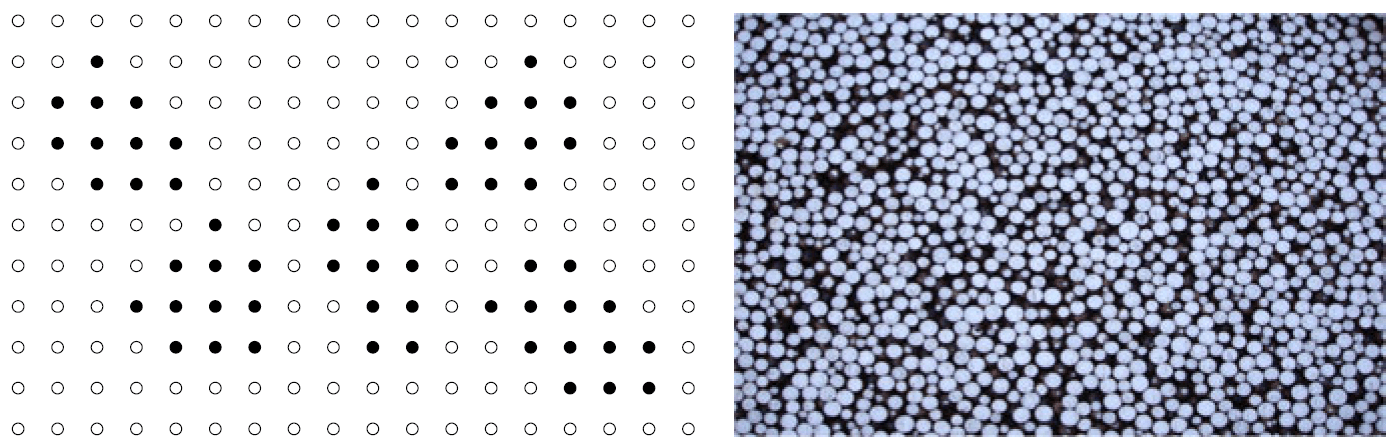
Análisis de regiones
Análisis de regiones
imagen binaria
regiones
conformadas por conjuntos máximos de pixeles conectados
Conectividad y adyacencia
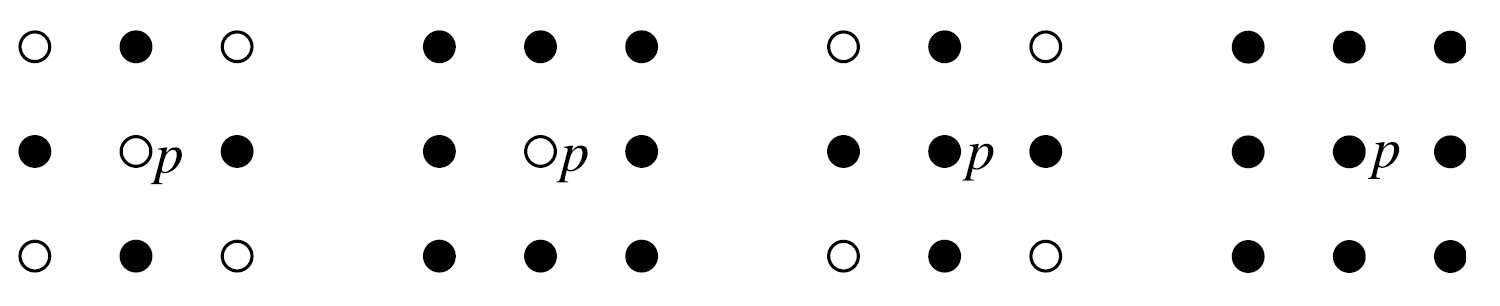
Conectividad y adyacencia
conjuntos de adyacencia
vecindarios
Conectividad y adyacencia
conjuntos de adyacencia
vecindarios
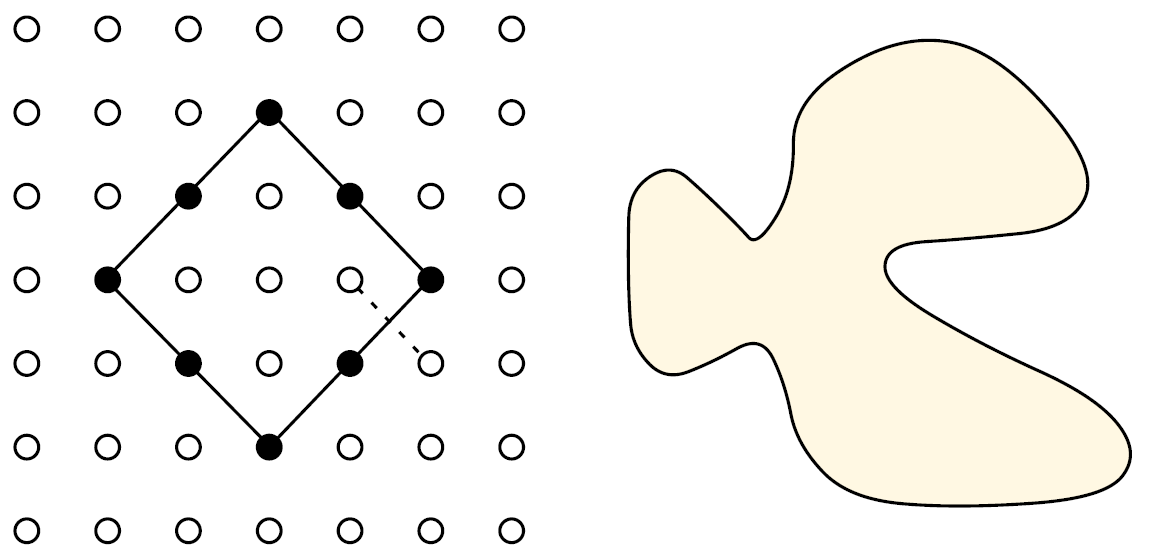
- El número de regiones puede cambiar dependiendo del tipo de conectividad considerada.
-
La topología de las regiones algunas veces no tiene "sentido" Euclideano.
Conteo según conectividad
Topología "extraña"


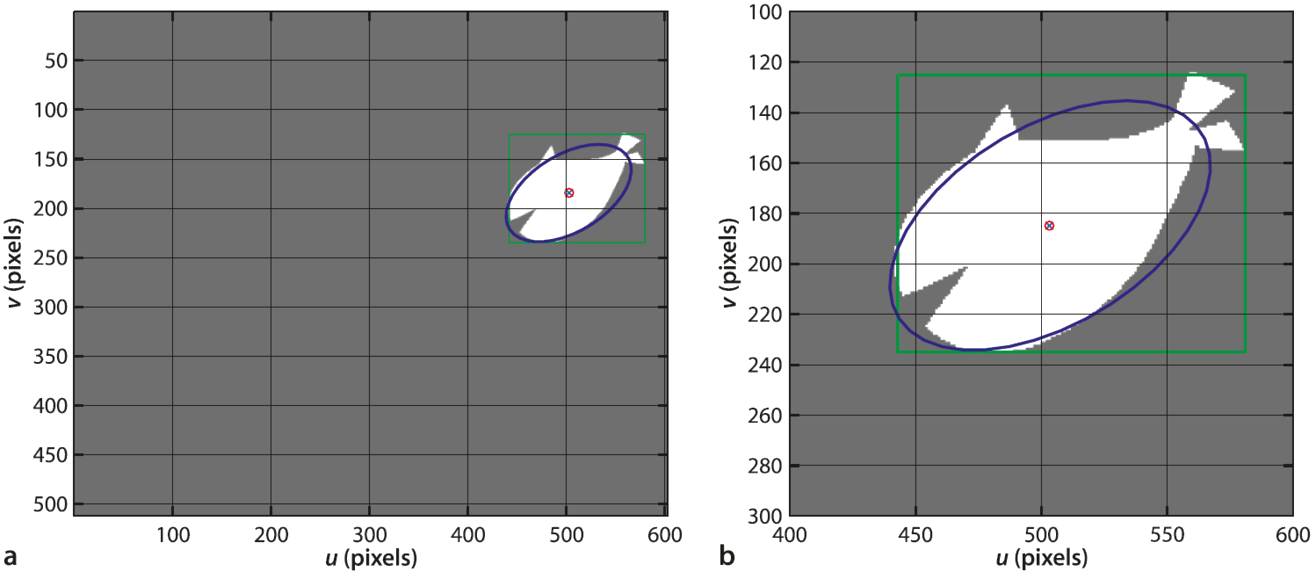
Análisis empleando momentos
Detección de líneas y círculos
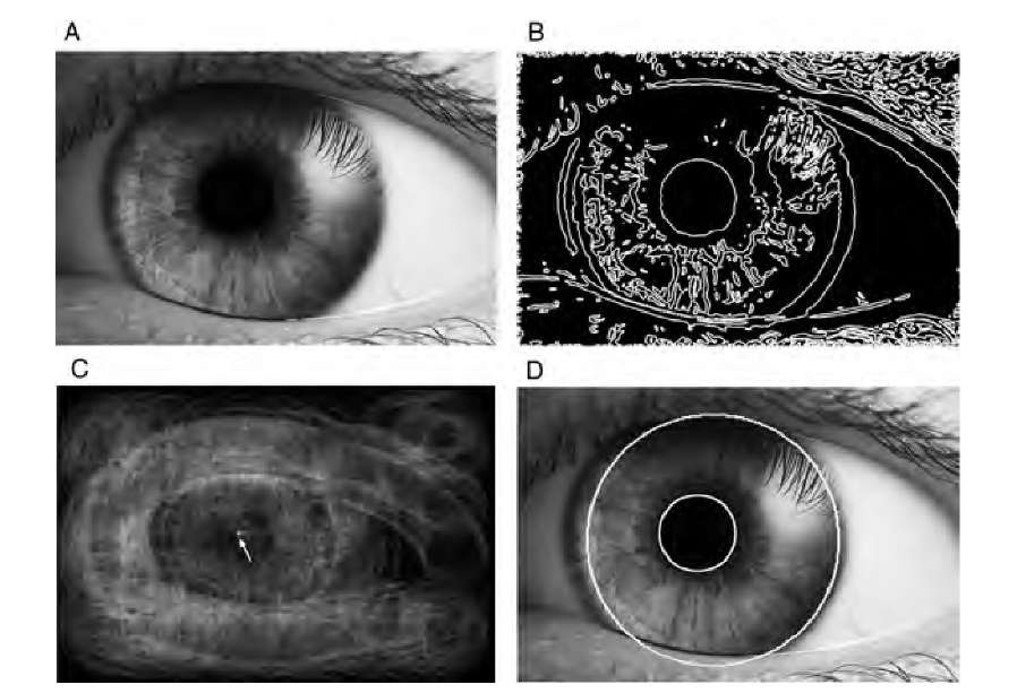

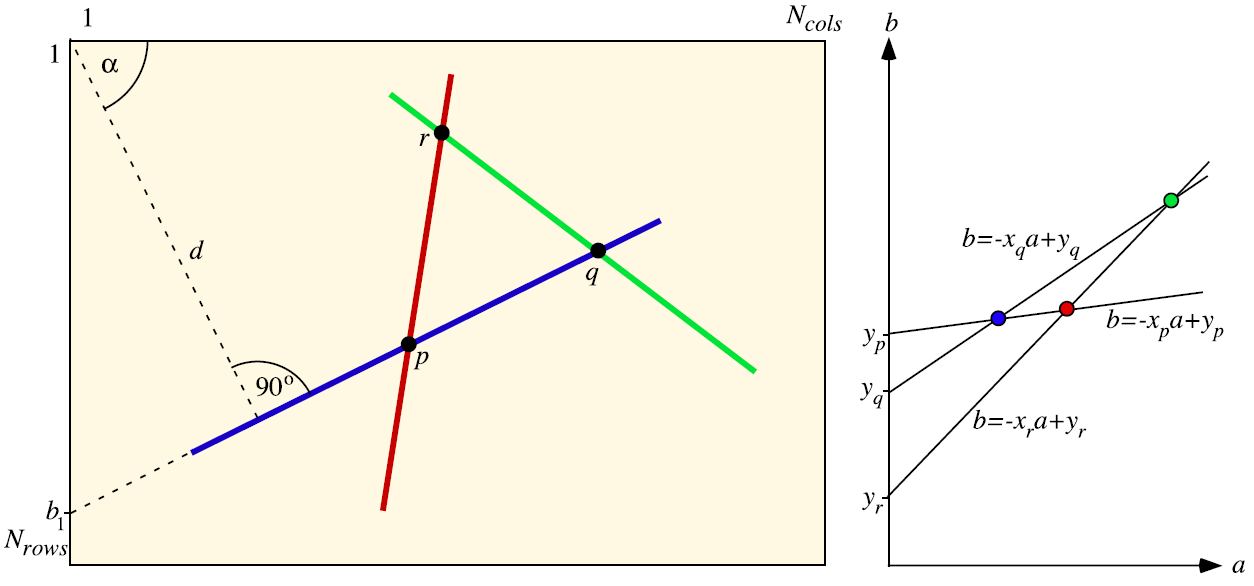
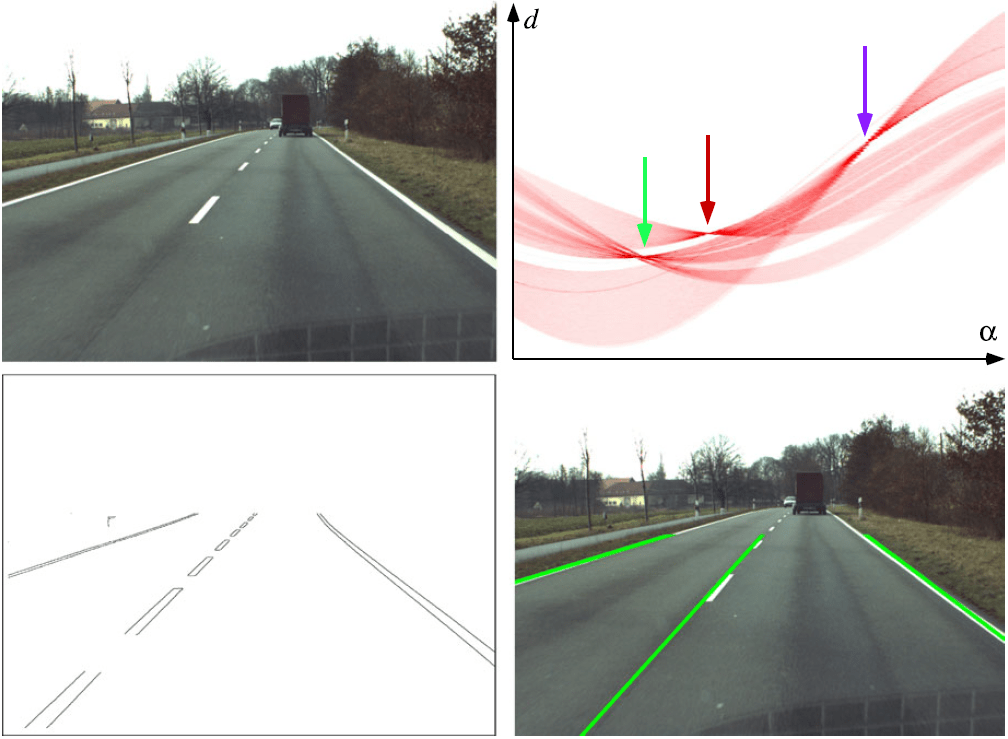
Transformada de Hough
Transformada de Hough para líneas
Segmentación


Referencias
- A. Torralba et al., Foundations of Computer Vision, bloques IV y V.
- R. Klette, Concise Computer Vision, capítulos 2, 3 y 5.
Detector de esquinas de Harris

MT3006 - Lecture 2 (2024)
By Miguel Enrique Zea Arenales



