
Lecture 5: Features, Neural Networks I
Intro to Machine Learning
Recall:
step
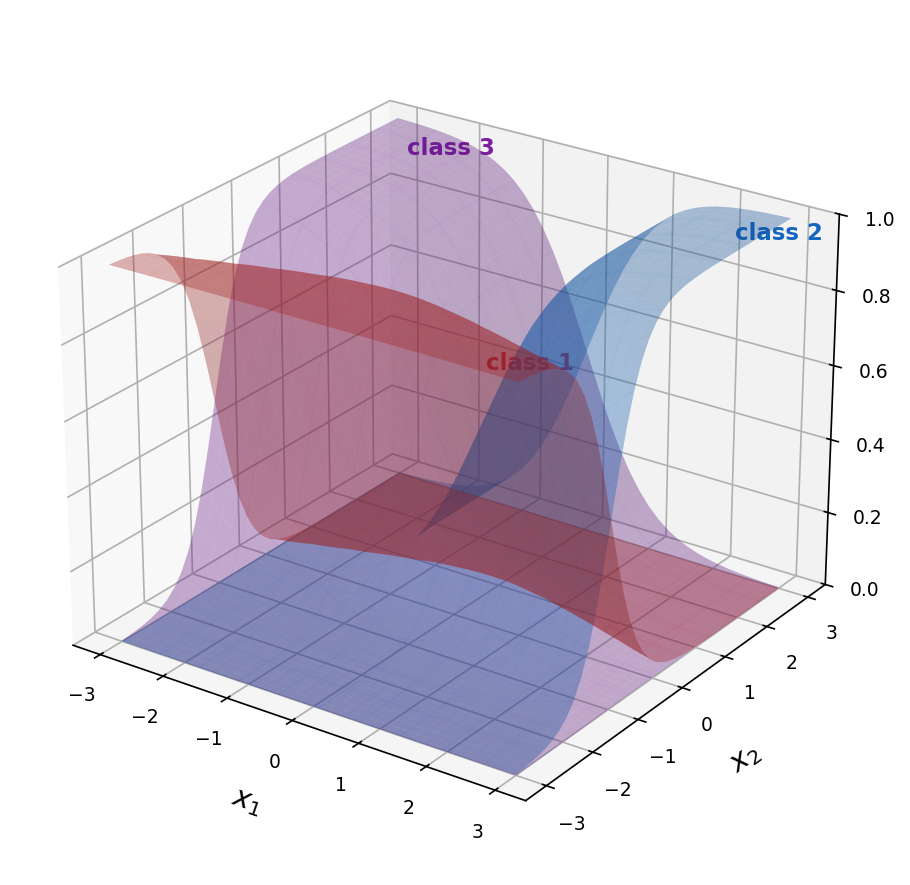
multi-class
\(z = \theta^{\top} x+\theta_0\)
\(z = \theta^{\top} x+\theta_0\)
\(z_k = \theta_k^{\top} x+\theta_{0,k}\)
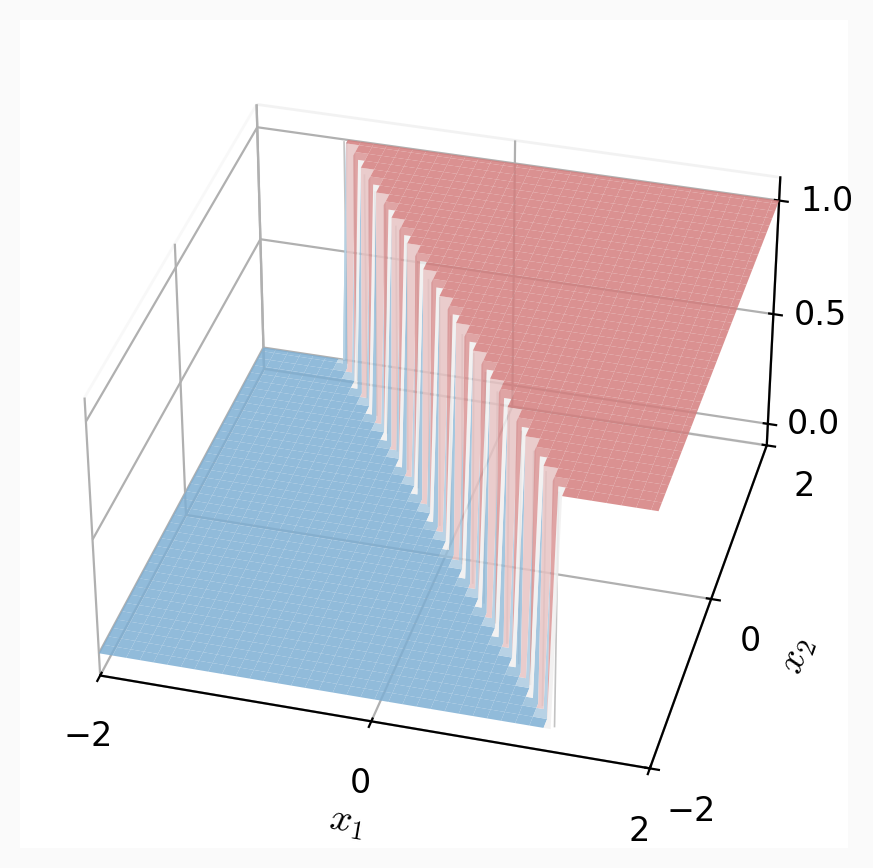
\(g = \text{step}(z)\)
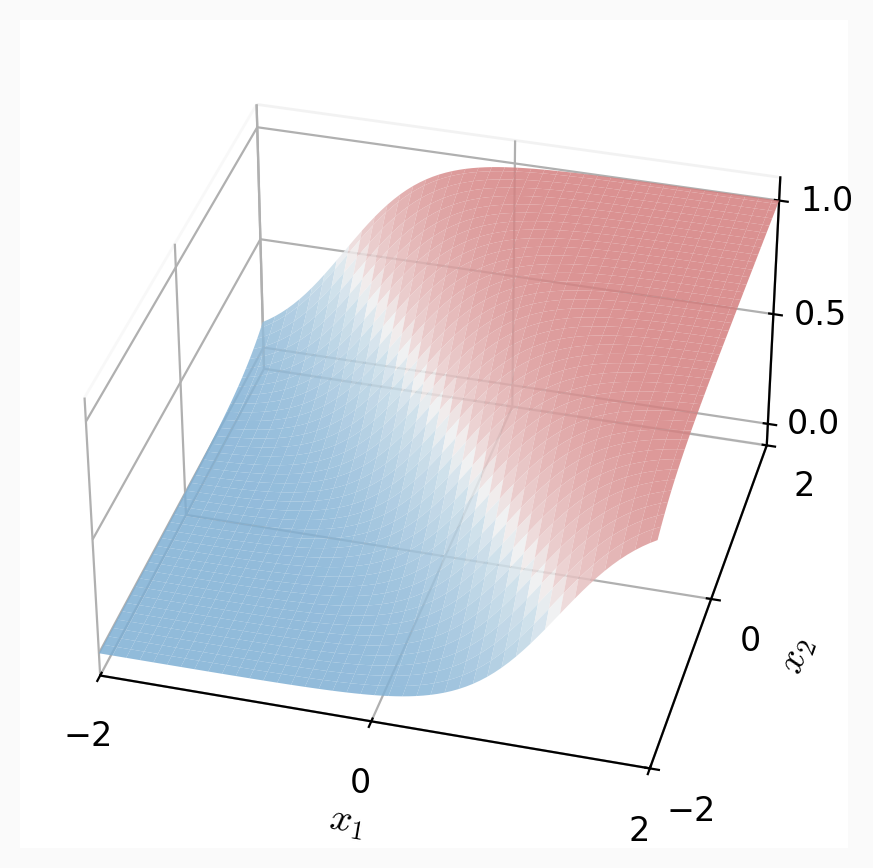
\(g = \sigma(z)\)
\(g = \text{softmax}(z_1,\ldots,z_K)\)
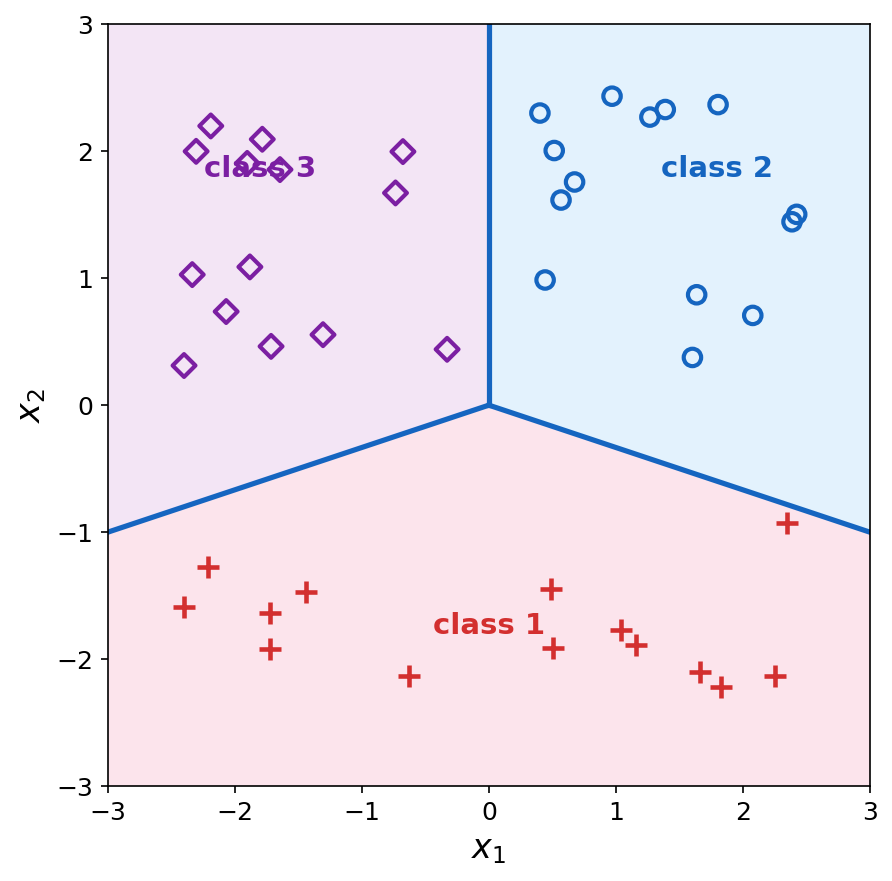
decision boundary is linear in feature \(x\)
logistic
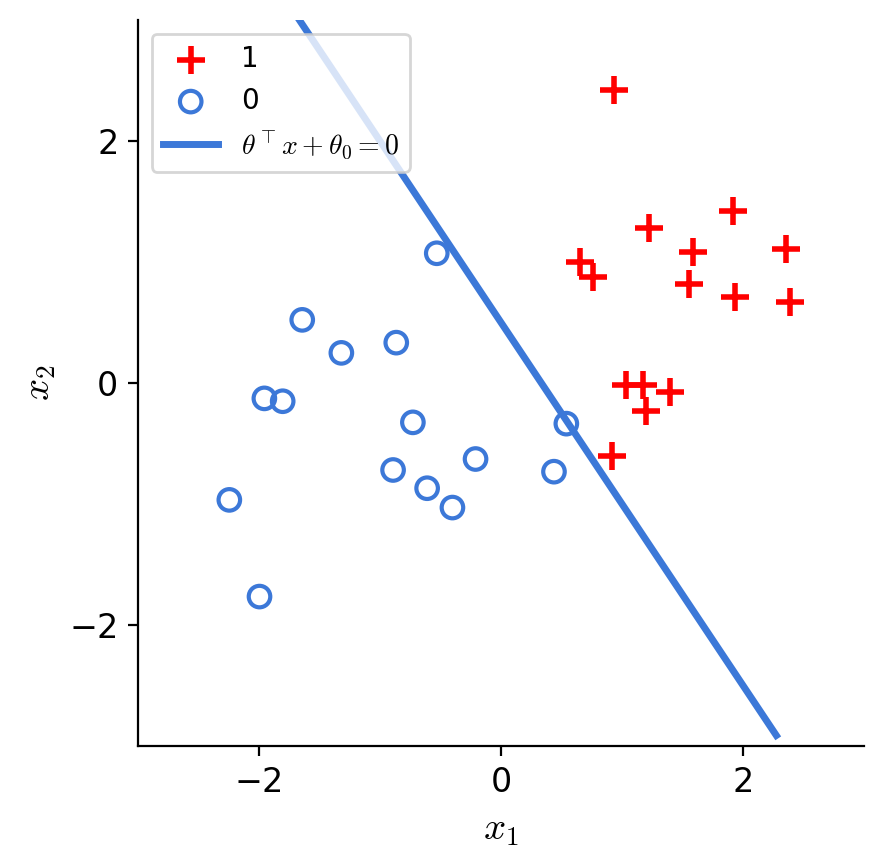
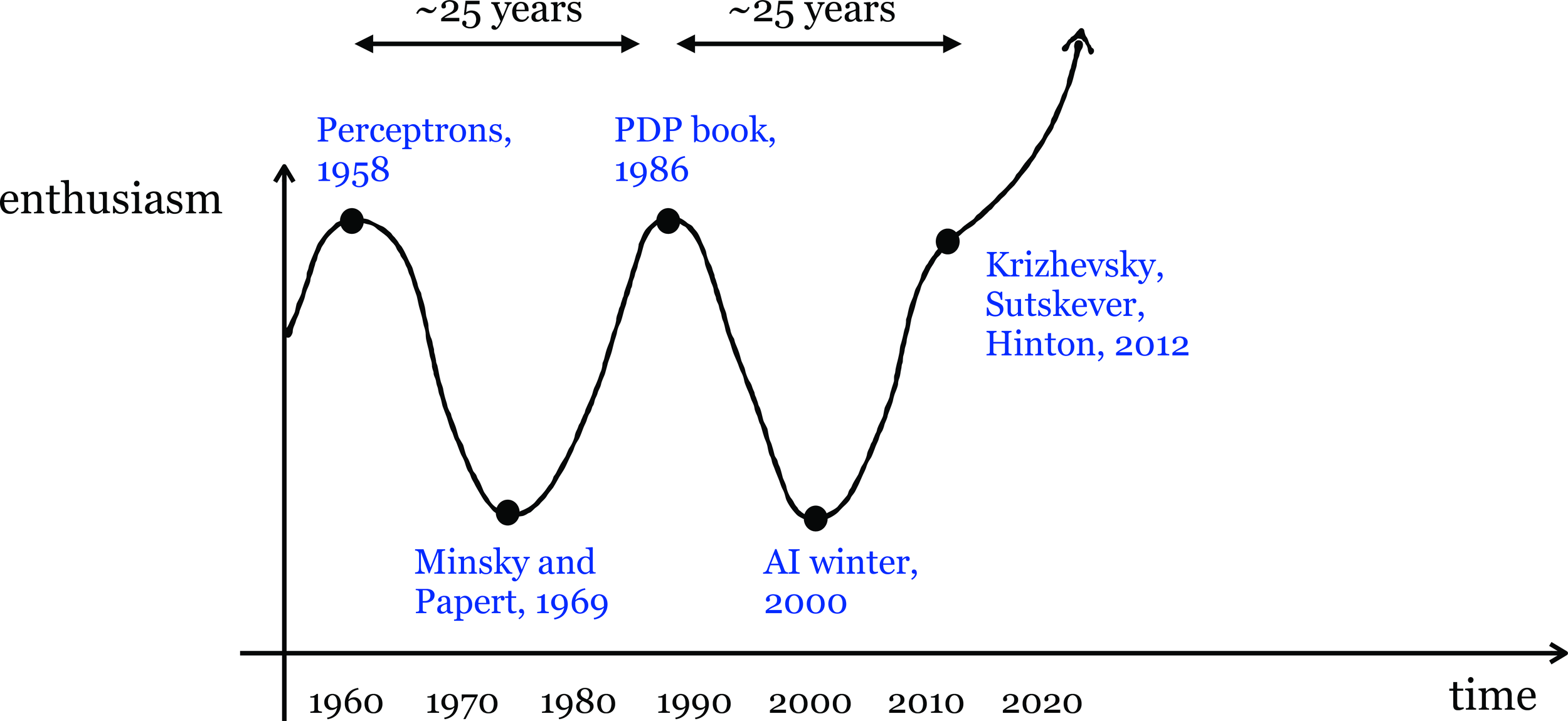
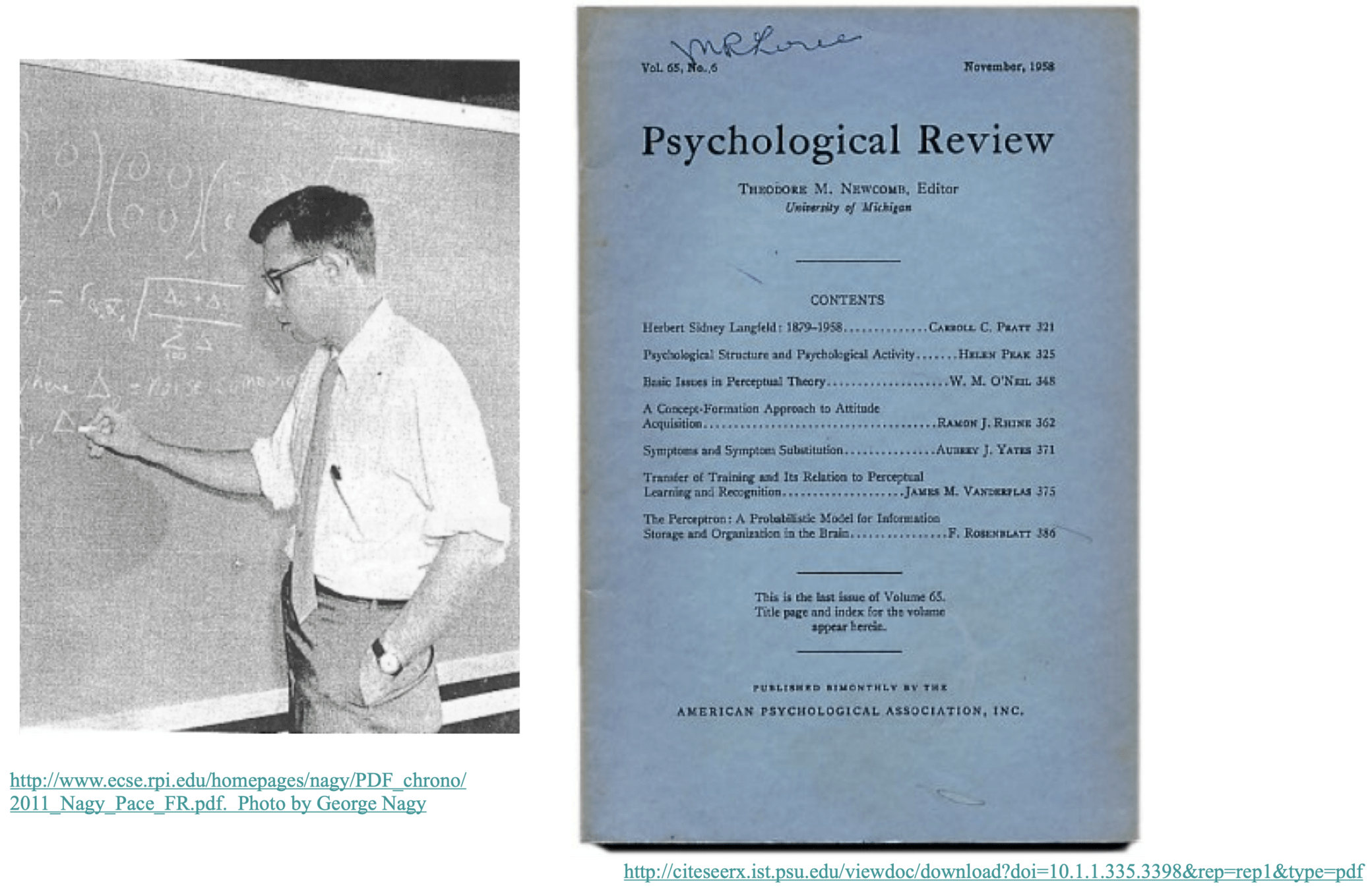
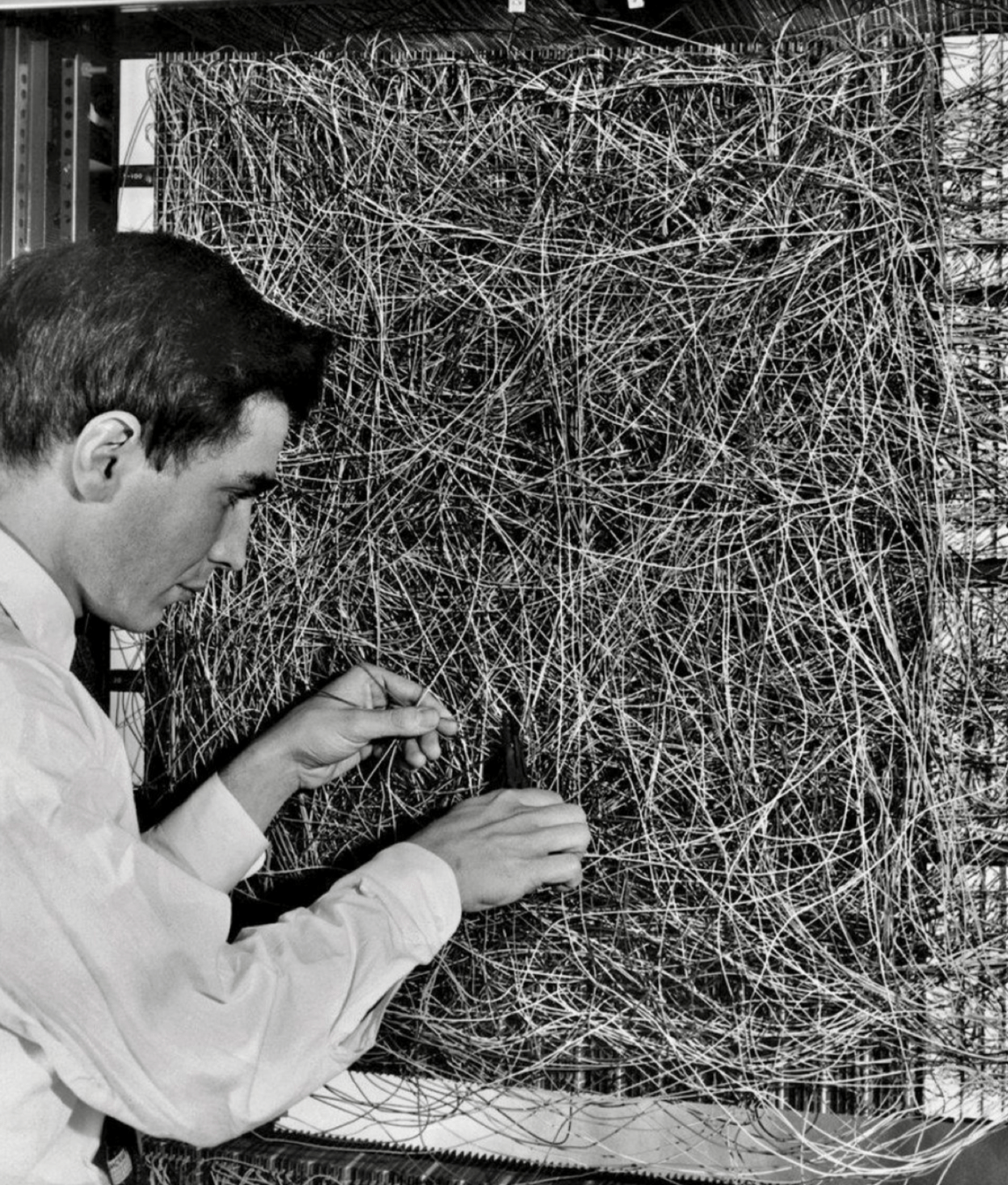
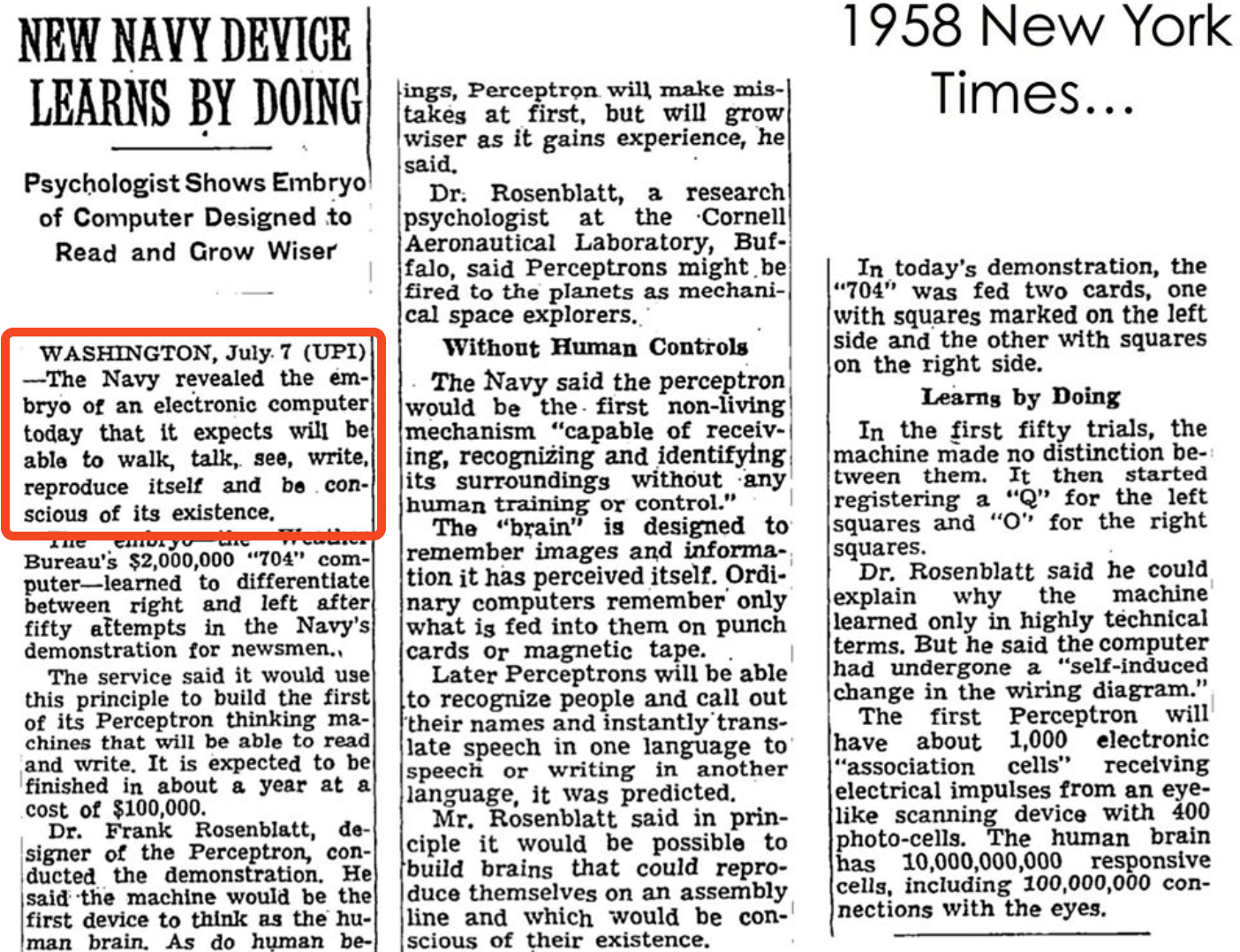
Linear classification played a pivotal role in kicking off the first wave of AI enthusiasm.
👆
👇
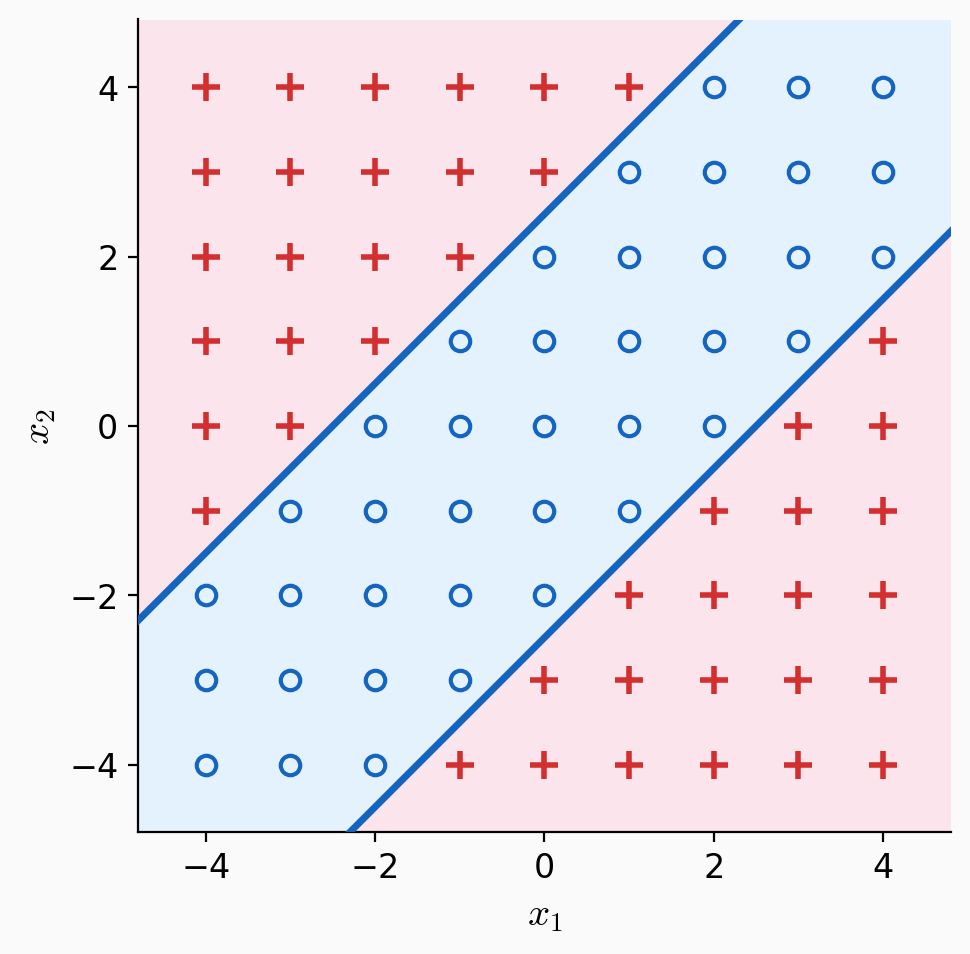
Not linearly separable.
Linear tools cannot solve interesting tasks.
Linear tools cannot, by themselves, solve interesting tasks.
XOR dataset
feature engineering 👉
👈 neural networks
Outline
-
Systematic feature transformations
- Engineered features
- Polynomial features
- Expressive power
- Neural networks
original features \(x \in \mathbb{R^d} \)
\longrightarrow
new features \(\phi(x) \in \mathbb{R^{d^{\prime}}}\)
non-linear in \(x\)
linear in \(\phi\)
\longrightarrow
non-linear
transformation
\(\phi\)
\theta_1\phi_1(x) + \theta_2\phi_2(x) + \dots + \theta_{d'}\phi_{d'}(x)
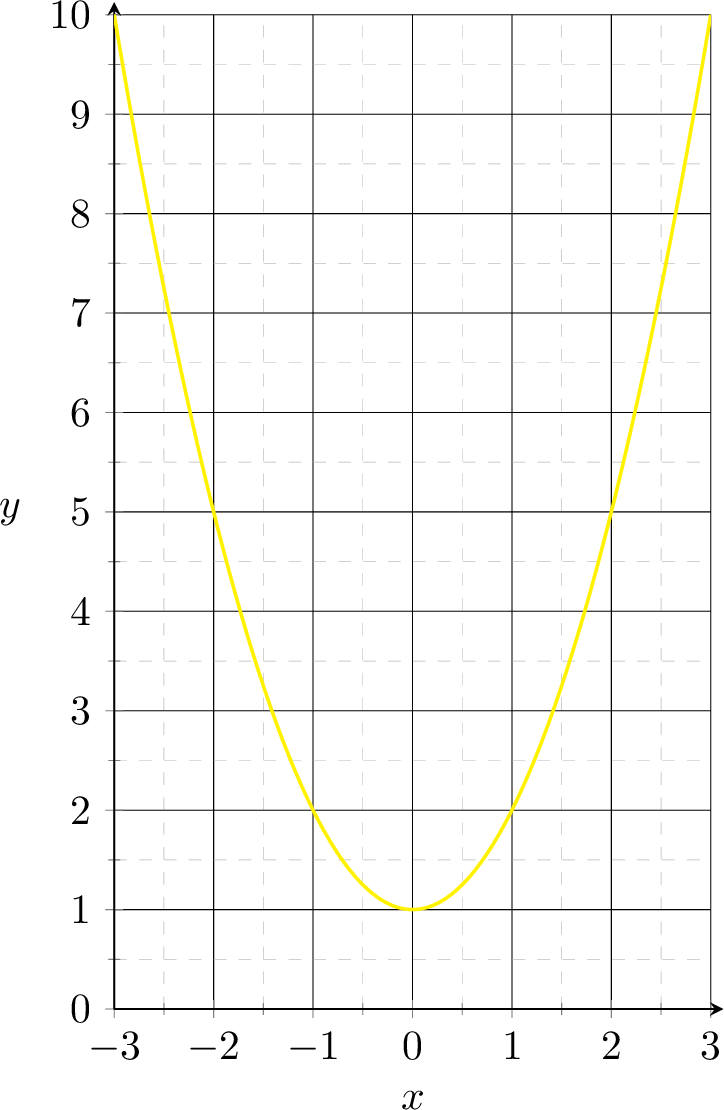
Linearly separable in \(\phi(x) = x^2\) space
Not linearly separable in \(x\) space
-3
-2
-1
0
1
2
3
4
5
6
7
8
9
\phi(x)
transform via \(\phi(x) = x^2\)
\Downarrow
-3
-2
-1
0
1
2
3
4
5
6
7
8
9
x
Linearly separable in \(\phi(x) = x^2\) space, e.g. predict positive if \(\phi \geq 3\)
Non-linearly separated in \(x\) space, e.g. predict positive if \(x^2 \geq 3\)
-3
-2
-1
0
1
2
3
4
5
6
7
8
9
\phi(x)
-2
-1
0
1
2
3
4
5
6
7
8
9
x
-3
transform via \(\phi(x) = x^2\)
\Downarrow
non-linear classification
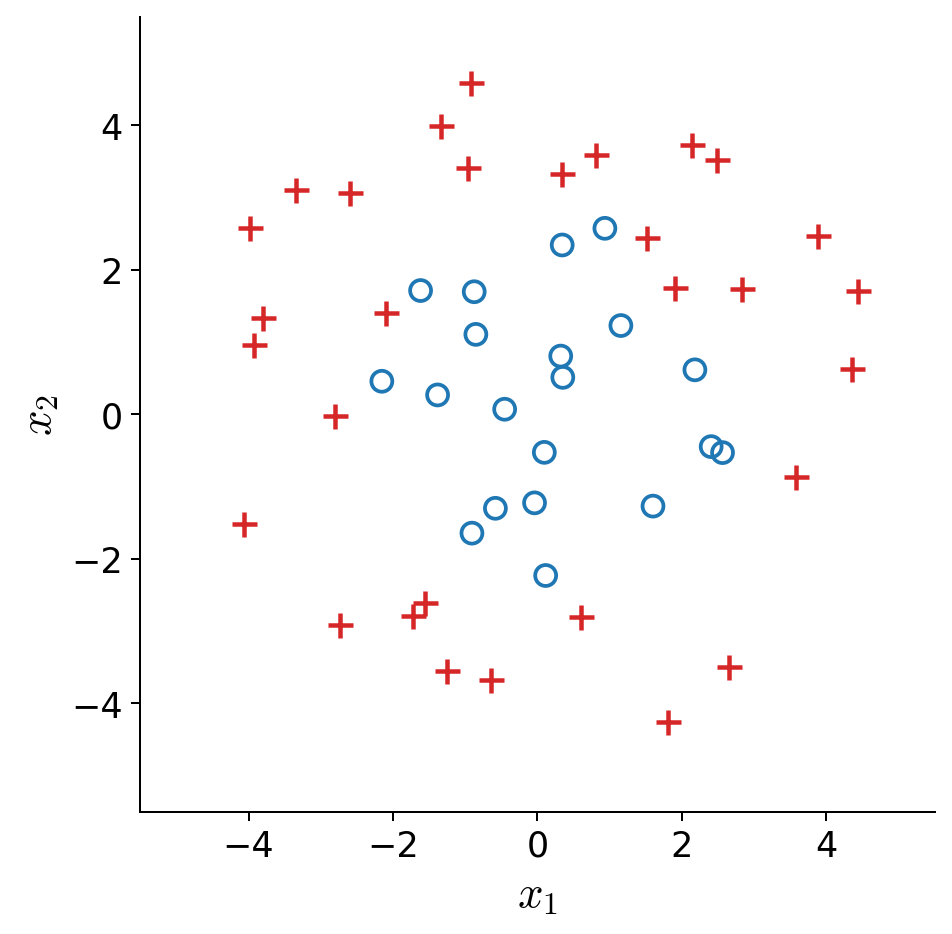
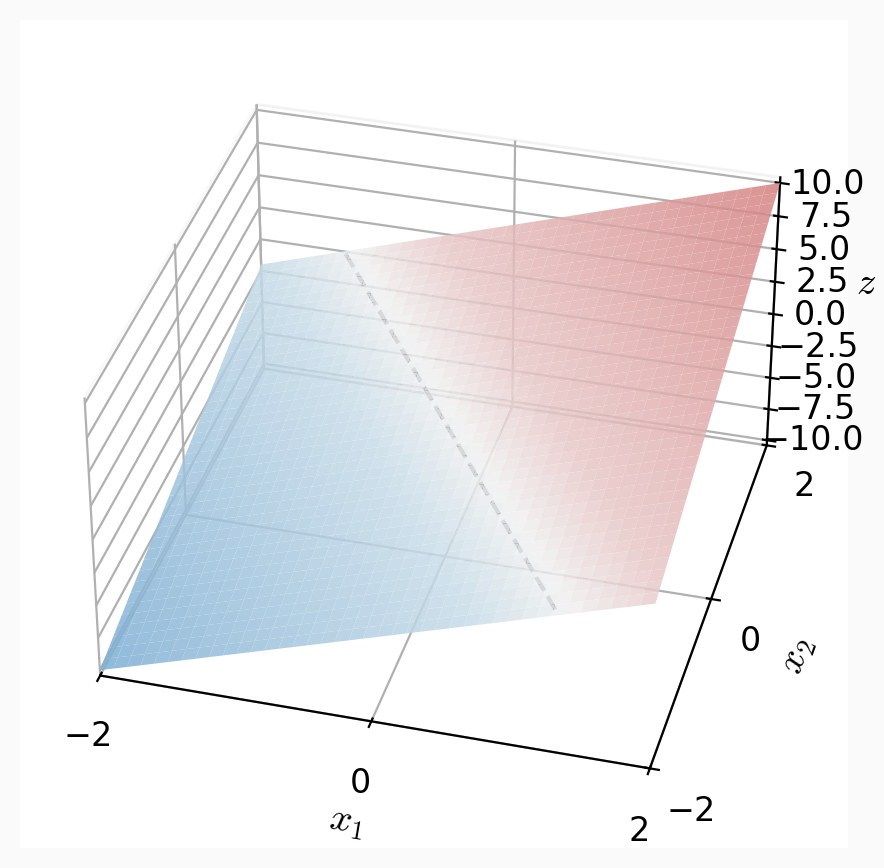
data in \(x\)-space
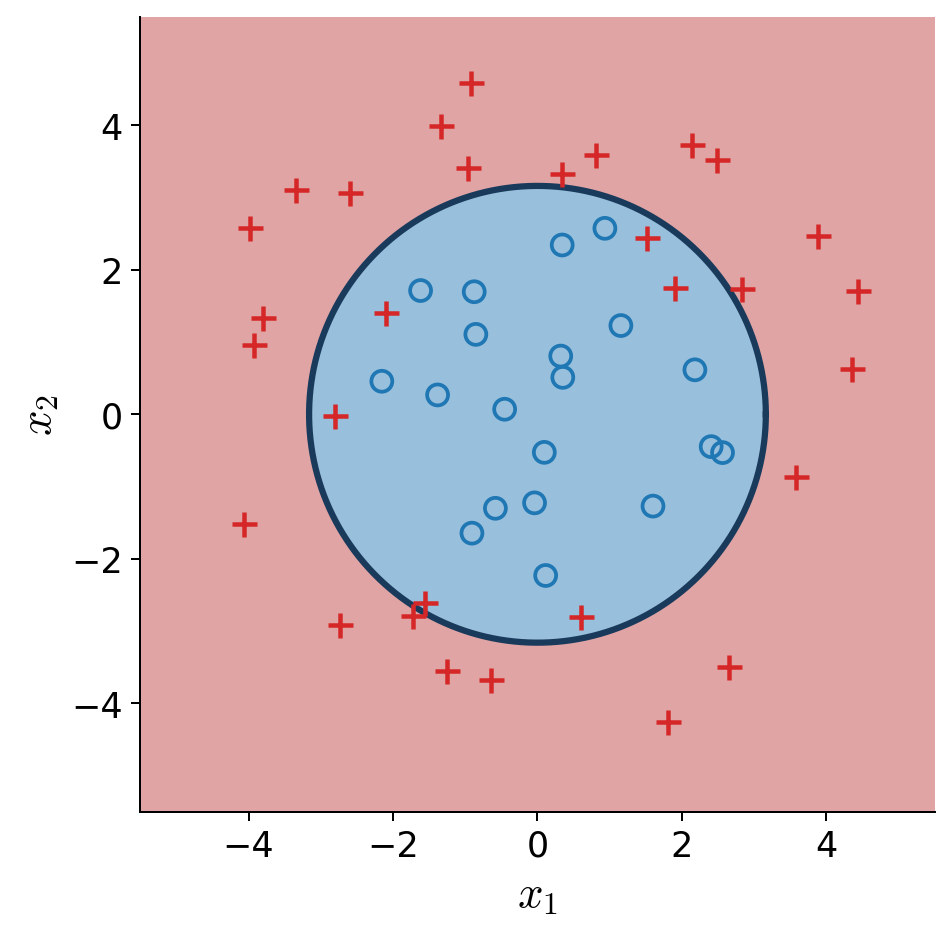
\(x_1^2 + x_2^2 = 10\): non-linear in \(x\)
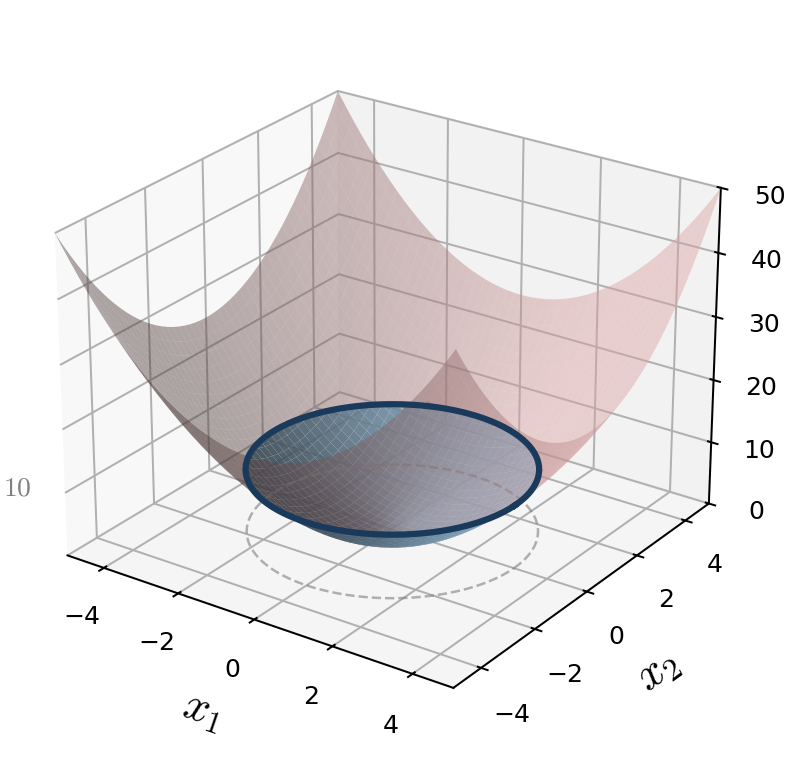
\(z = x_1^2 + x_2^2\), threshold at \(z\!=\!10\)
transform via \(\phi(x) = (x_1^2,\, x_2^2)\)
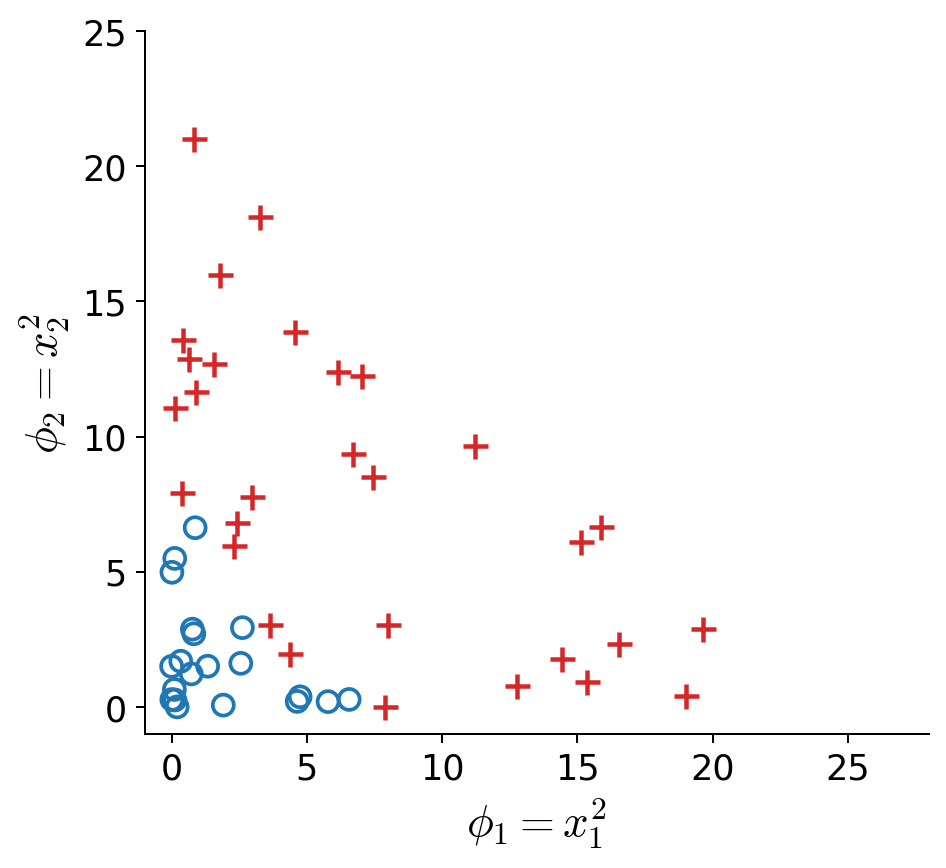
data in \(\phi\)-space
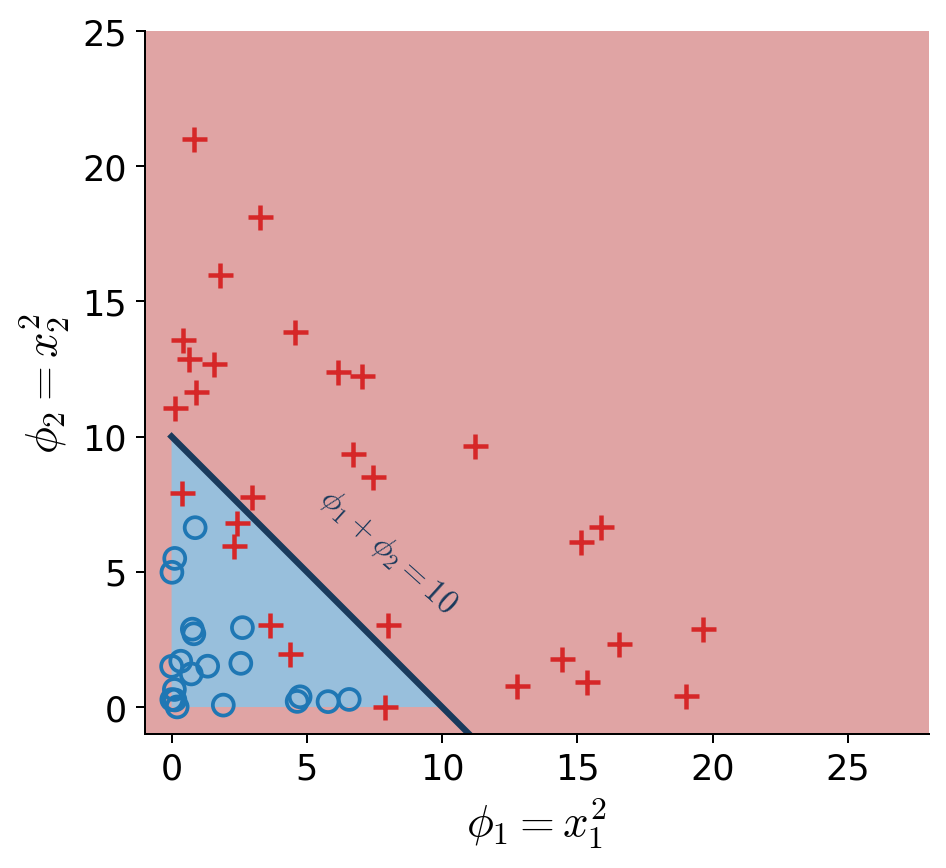
\(\phi_1 + \phi_2 = 10\): linear in \(\phi\)
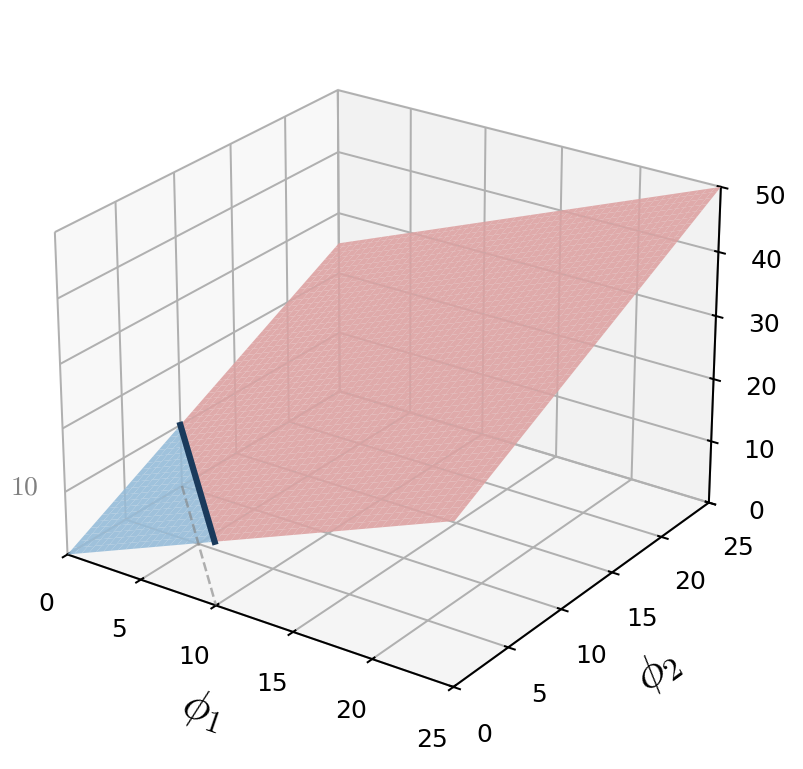
\(z = \phi_1 + \phi_2\), threshold at \(z\!=\!10\)
decision boundary is linear in \(\phi,\) nonlinear in \(x\)
training data
| \(x\) | \(y\) | |
| p1 | -2 | 5 |
| p2 | 1 | 2 |
| p3 | 3 | 10 |
\Rightarrow
transform via
\(\phi(x)=x^2\)
training data
| \(\phi\) | \(y\) | |
| p1 | 4 | 5 |
| p2 | 1 | 2 |
| p3 | 9 | 10 |
non-linear regression
\(g = \phi + 1\)
\(g = x^2 + 1\)
systematic polynomial features construction
| \(d = 1\), features: \(x_1\) | \(d = 2\), features: \(x_1, x_2\) | |
|---|---|---|
| \(k=0\) | \(1\) | \(1\) |
| \(k=1\) | \(1\) \(x_1\) | \(1\) \(x_1,\; x_2\) |
| \(k=2\) | \(1\) \(x_1\) \(x_1^2\) | \(1\) \(x_1,\; x_2\) \(x_1^2,\; x_1 x_2,\; x_2^2\) |
| \(k=3\) | \(1\) \(x_1\) \(x_1^2\) \(x_1^3\) | \(1\) \(x_1,\; x_2\) \(x_1^2,\; x_1 x_2,\; x_2^2\) \(x_1^3,\; x_1^2 x_2,\; x_1 x_2^2,\; x_2^3\) |
| \(\vdots\) | \(\vdots\) | \(\vdots\) |
- Elements in the basis are the monomials of original features raised up to power \(k\)
- With a given \(d\) and a fixed \(k\), the basis is fixed.
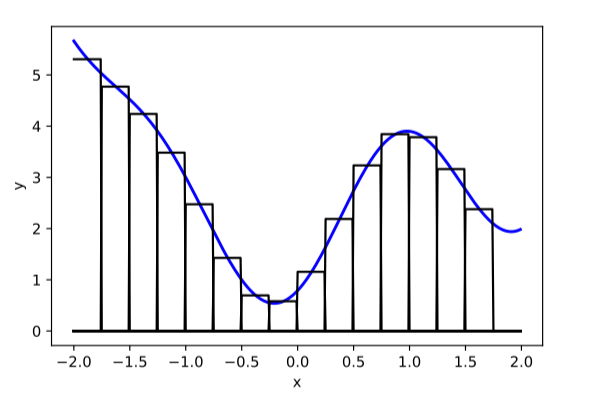
- \(n = 9\) data points, each with feature \(x \in \mathbb{R}\) and label \(y \in \mathbb{R}\)
- data generated from green dashed curve
k=1
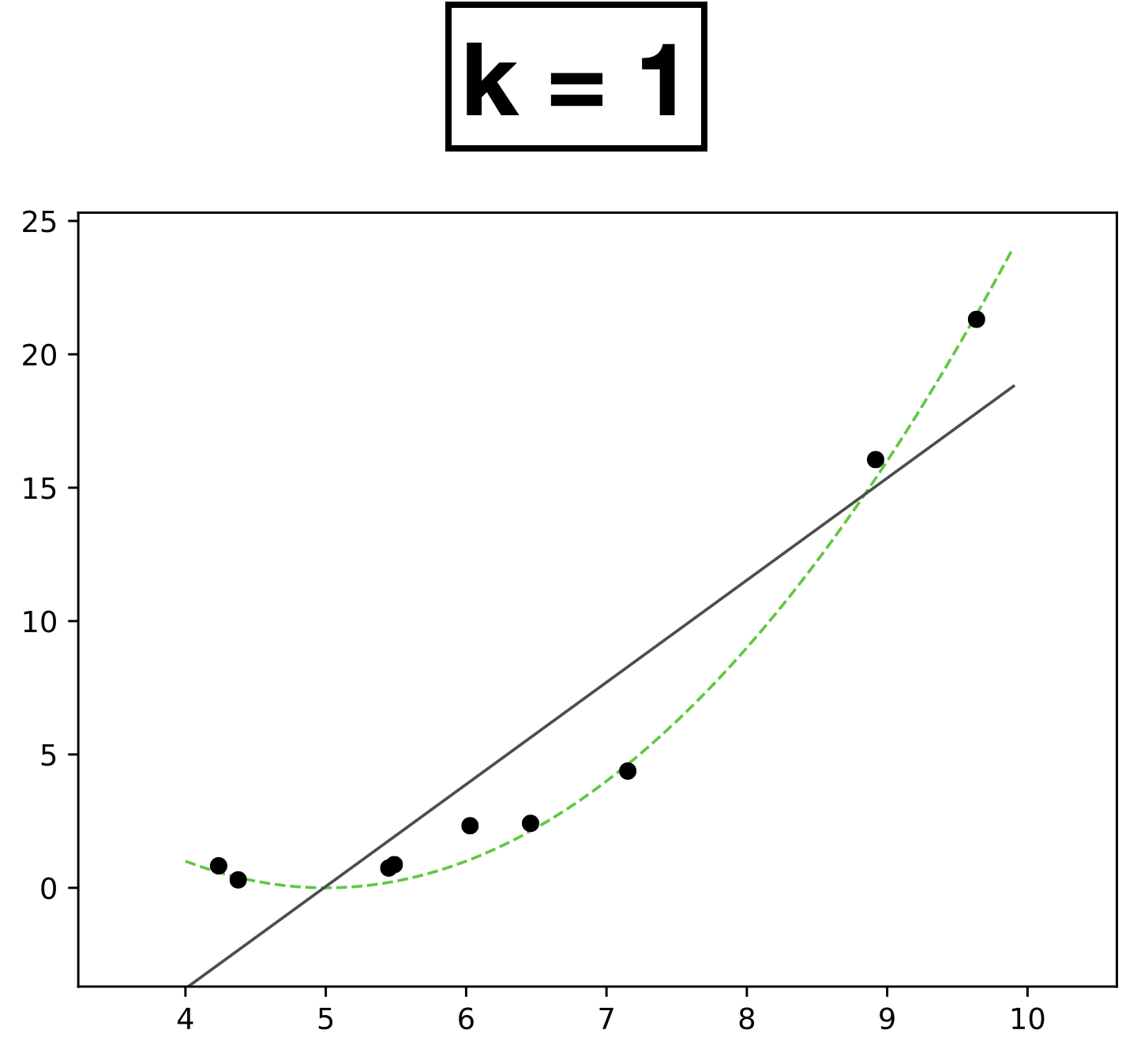
\( h = \textcolor{#4a6fa5}{\theta_0} + \textcolor{#4a6fa5}{\theta_1} \textcolor{#888}{x} \)
Learn 2 parameters — degree-1
k=2
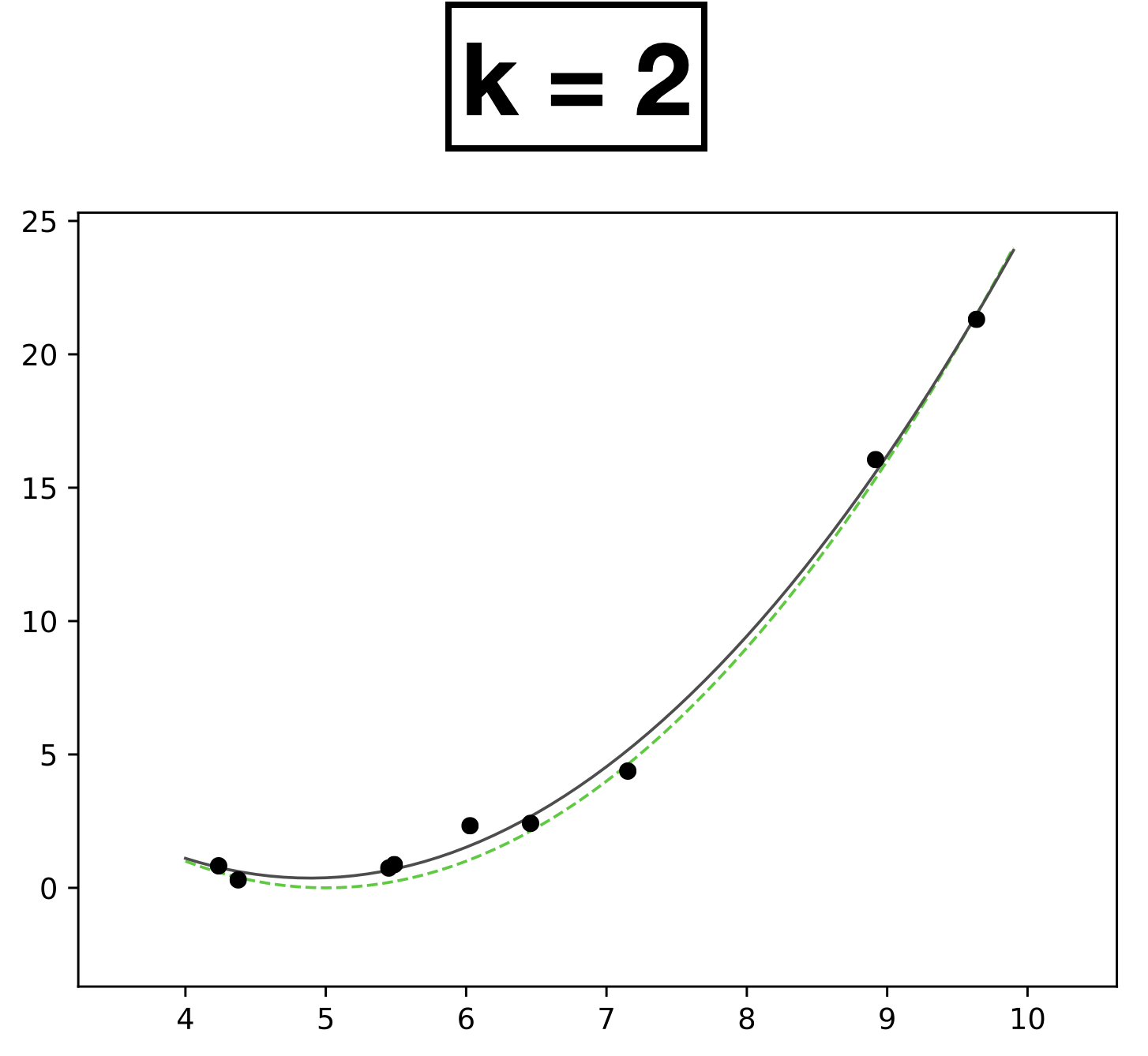
\( h = \textcolor{#4a6fa5}{\theta_0} + \textcolor{#4a6fa5}{\theta_1} \textcolor{#888}{x} + \textcolor{#4a6fa5}{\theta_2} \textcolor{#888}{x^2} \)
Learn 3 parameters — degree-2
Underfitting
Appropriate model
Overfitting
k=1
k=2
k=10
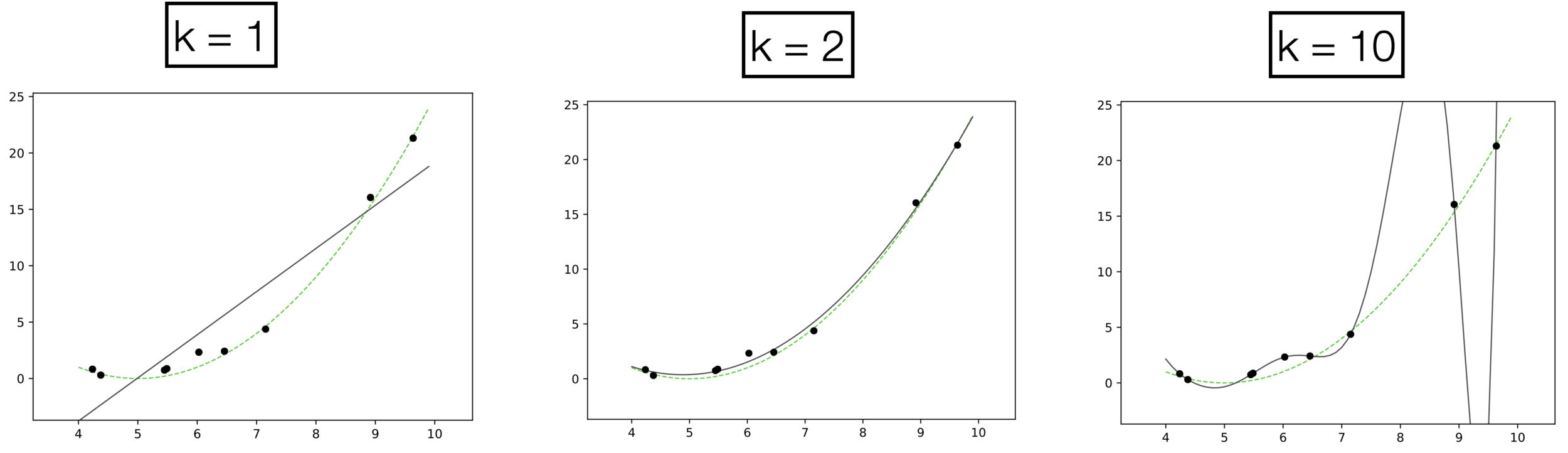
high error on train set
high error on test set
low error on train set
low error on test set
low error on train set
high error on test set
- \(k:\) a hyperparameter that determines the capacity (expressiveness) of the hypothesis class.
- Models with many rich features and free parameters tend to have high capacity but also greater risk of overfitting.
- How to choose \(k?\) Validation/cross-validation.
Previously:
\downarrow
x
g
\downarrow
\rightarrow
\boxed{h}
\rightarrow
🧠⚙️
hypothesis class
loss function
hyperparameters
\(\left\{\left(x^{(i)}, y^{(i)}\right)\right\}_{i=1}^{n}\)
Linear
Learning Algorithm
- Linear models are convenient but lack expressiveness for real-world tasks.
- We applied fixed nonlinear feature transformations, then used linear methods.
- The essence of ML was feature engineering — manually designing useful representations.
\downarrow
x
g
\downarrow
\rightarrow
\boxed{h}
\rightarrow
\(\left\{\left(\phi(x^{(i)}), y^{(i)}\right)\right\}_{i=1}^{n}\)
Linear
Learning Algorithm
🧠⚙️
hypothesis class
loss function
hyperparameters
\downarrow
\phi(x)
today, so far:
\xrightarrow{\hspace{1.5cm}}
🧠⚙️
feature
transformation \(\phi(x)\)
can we automate 👆?
i.e. fold it into the learning algorithm?
\(\left\{\left(x^{(i)}, y^{(i)}\right)\right\}_{i=1}^{n}\)
\downarrow
x
g
\downarrow
\rightarrow
\boxed{h}
\rightarrow
Non-linear
Learning Algorithm
🧠⚙️
hypothesis class
loss function
hyperparameters
neural networks:
\(\left\{\left(x^{(i)}, y^{(i)}\right)\right\}_{i=1}^{n}\)
the nonlinearity \(\phi\) is learned not hand-designed
Outline
- Systematic feature transformations
-
Neural networks
- Terminology
- Design choices
👋 heads-up:
all neural network diagrams focus on a single data point
Outlined the fundamental concepts of neural networks:
expressiveness
efficient learning
- Nonlinear feature transformation
- Composing simple nonlinearities amplifies this effect
- Backpropagation
\left\{
\begin{array}{l}
\\
\\
\end{array}
\right.
\left\}
\begin{array}{l}
\\
\\
\end{array}
\right.
layered structure
We abstract this into a simple mathematical unit.
importantly, linear in \(\phi\), non-linear in \(x\)
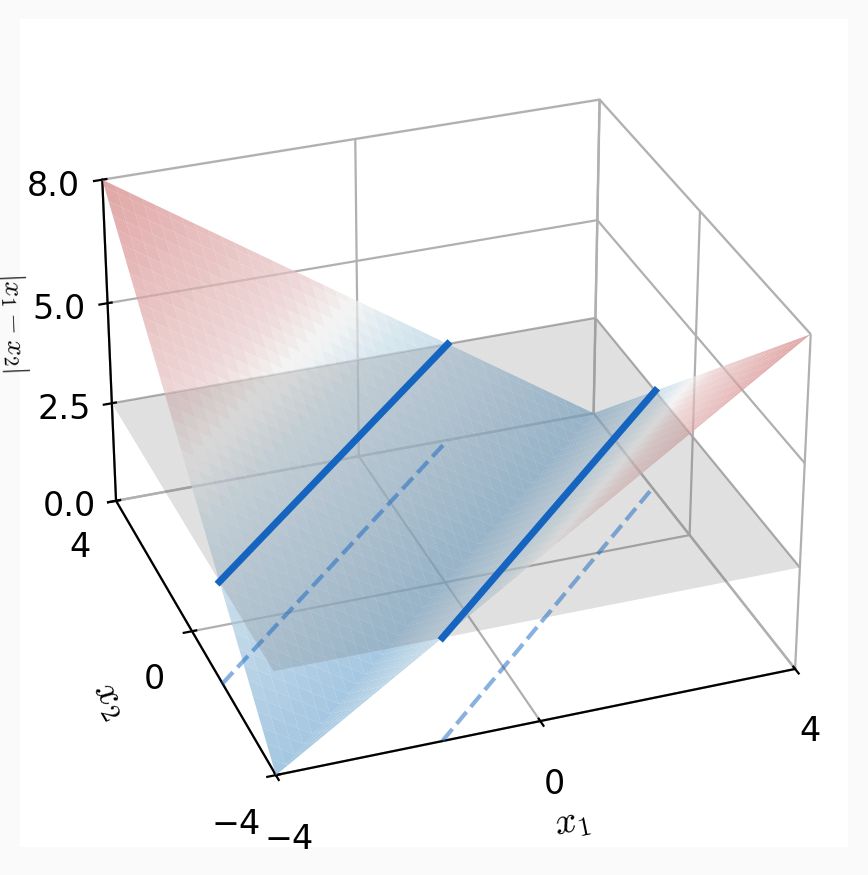
- Nonlinear feature transformation
\phi\left(\left[x_1; x_2\right]\right)=\left[|x_1-x_2|\right]
\phi\left(\left[x_1; x_2\right]\right)=\left[|x_1-x_2|\right] = 2.5
transform via

- "Composing" simple transformations
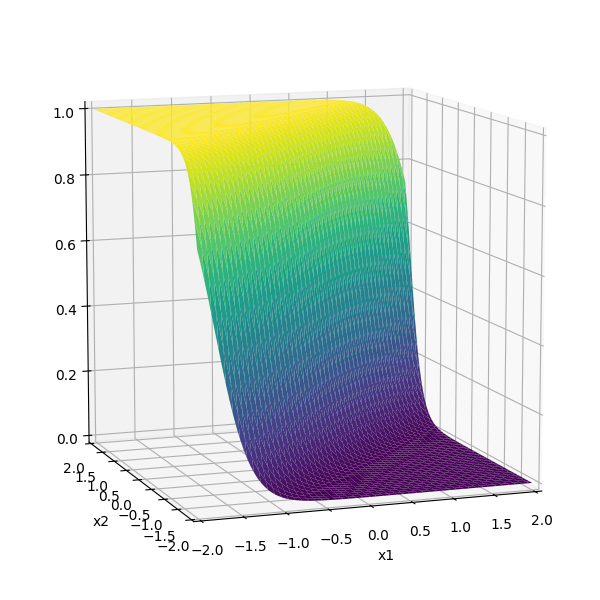
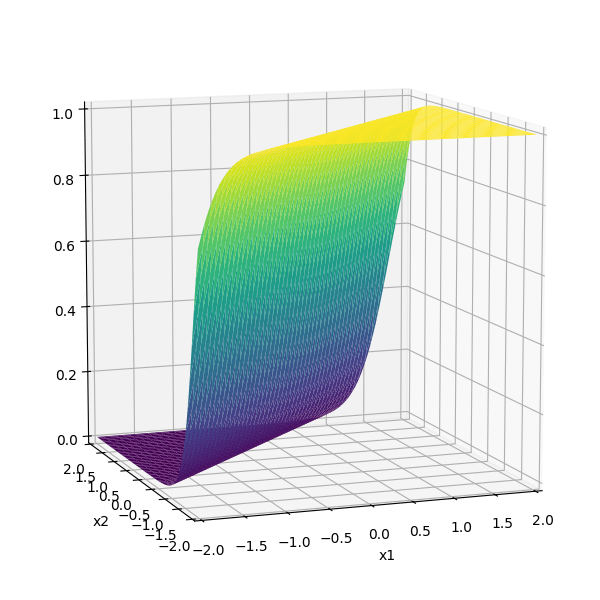
\sigma_1 = \sigma(5 x_1 -5 x_2 + 1)
\sigma_2 = \sigma(-5 x_1 + 5 x_2 + 1)
some appropriately weighted sum
- "Composing" simple transformations
=
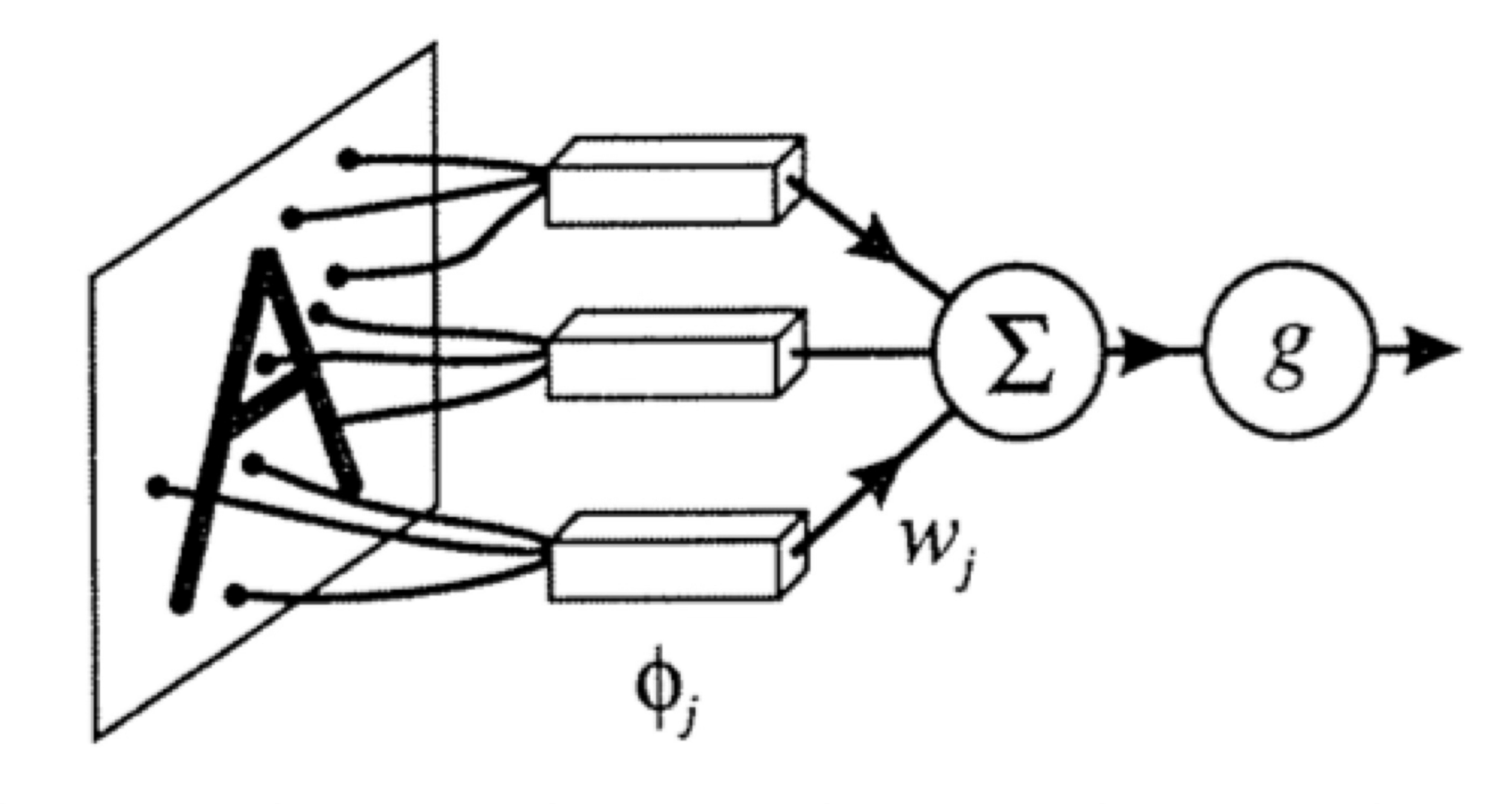
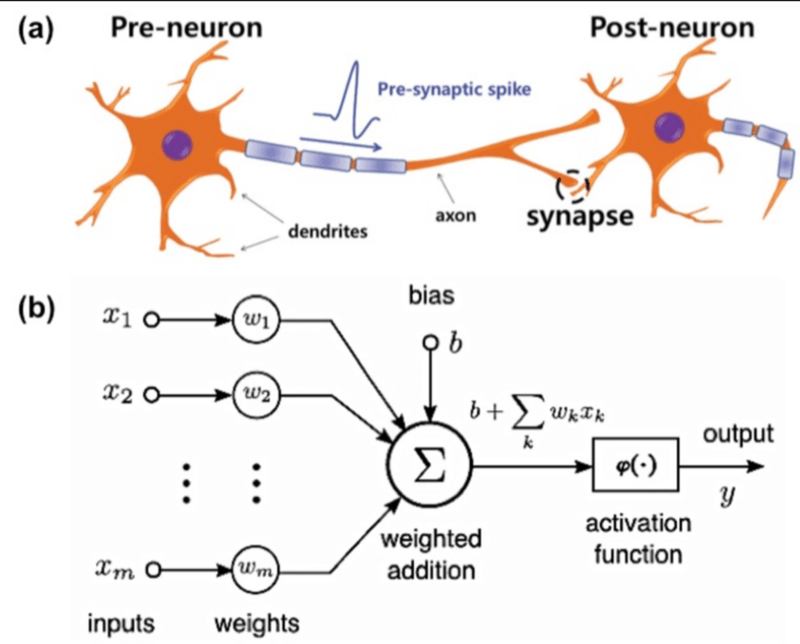
A neuron:
\(w\): what the algorithm learns
- \(x\): \(d\)-dimensional input
a = f(z)
\Sigma
A neuron:
- \(a\): post-activation output
- \(f\): activation function
- \(w\): weights (i.e. parameters)
- \(z\): pre-activation output
\(f\): what we engineers choose
\dots
x_1
x_2
x_d
x = \left[ \begin{array}{c}
\\
\\
\\
\\
\\
\\
\\
\end{array} \right]
w_1
w_d
\dots
w_2
= w^Tx
z
f(\cdot)
= f(w^Tx)
\(z\): scalar
\(a\): scalar
Choose activation \(f(z)=z\)
learnable parameters (weights)
e.g. linear regressor represented as a computation graph
= z
= w^Tx
w_1
w_d
\dots
x_1
x_2
x_d
\dots
x = \left[ \begin{array}{c}
\\
\\
\\
\\
\\
\\
\\
\end{array} \right]
w_2
\Sigma
f(\cdot)
g
z
Choose activation \(f(z)=\sigma(z)\)
learnable parameters (weights)
e.g. linear logistic classifier represented as a computation graph
= \sigma(z)
= w^Tx
w_1
w_d
\dots
x_1
x_2
x_d
\dots
w_2
\Sigma
f(\cdot)
g
z
x = \left[ \begin{array}{c}
\\
\\
\\
\\
\\
\\
\\
\end{array} \right]
\dots
A layer:
learnable weights
A layer:
a^1
z^1
\Sigma
f(\cdot)
z^2
\Sigma
f(\cdot)
a^2
z^m
a^m
\Sigma
f(\cdot)
\dots
x_1
x_2
x_d
- (# of neurons) = layer's output dimension.
- activations applied element-wise, e.g. \(z^1\) won't affect \(a^2\). (softmax in the output layer is a common exception)
- all neurons in a layer typically share the same \(f\) (mixed \(f\) is possible but complicates the math).
- layers are typically fully connected, each input \(x_i\) influences every \(a^j\) .
\dots
layer
linear combo
activations
A (fully-connected, feed-forward) neural network:
\dots
\dots
layer
\dots
x_1
x_2
x_d
input
\Sigma
f(\cdot)
\Sigma
f(\cdot)
\Sigma
f(\cdot)
\Sigma
f(\cdot)
\Sigma
f(\cdot)
\Sigma
f(\cdot)
\Sigma
f(\cdot)
neuron
learnable weights
Engineers choose:
- activation \(f\) in each layer
- # of layers
- # of neurons in each layer
hidden
output
\sigma_1 = \sigma(5 x_1 -5 x_2 + 1)
\sigma_2 = \sigma(-5 x_1 + 5 x_2 + 1)
some appropriately weighted sum
=
recall this example
x_1
x_2
1
\Sigma
f(\cdot)
\Sigma
f(\cdot)
\Sigma
f(\cdot)
\(f =\sigma(\cdot)\)
\(f(\cdot) \) identity function
W^1
W^2
\sigma_1 = \sigma(5 x_1 -5 x_2 + 1)
\sigma_2 = \sigma(-5 x_1 + 5 x_2 + 1)
5
-5
1
-5
5
1
-3
-3
\(-3(\sigma_1 +\sigma_2)\)
can be represented as:
- Activation \(f\) is chosen as the identity function
- Evaluate the loss \(\mathcal{L} = (g^{(i)}-y^{(i)})^2\)
- Repeat for each data point, average the sum of \(n\) individual losses
e.g. forward-pass of a linear regressor
y^{(i)}
f(\cdot)
\underbrace{\quad \quad \quad }
\dots
= w^Tx
w_1
w_d
\dots
w_2
\Sigma
z
= z
g
\dots
x^{(i)}_1
x^{(i)}_2
x^{(i)}_d
x^{(i)} \quad = \left[ \begin{array}{c}
\\
\\
\\
\\
\\
\\
\\
\end{array} \right]
\mathcal{L}(g, y)
\mathcal{L}(g, y)
\mathcal{L}(g, y)
\dots
\dots
\dots
n
- Activation \(f\) is chosen as the sigmoid function
- Evaluate the loss \(\mathcal{L} = - [y^{(i)} \log g^{(i)}+\left(1-y^{(i)}\right) \log \left(1-g^{(i)}\right)]\)
- Repeat for each data point, average the sum of \(n\) individual losses
e.g. forward-pass of a linear logistic classifier
y^{(i)}
f(\cdot)
\underbrace{\quad \quad \quad }
\dots
= w^Tx
w_1
w_d
\dots
w_2
\Sigma
z
=\sigma(z)
g
\dots
x^{(i)}_1
x^{(i)}_2
x^{(i)}_d
x^{(i)} \quad = \left[ \begin{array}{c}
\\
\\
\\
\\
\\
\\
\\
\end{array} \right]
\mathcal{L}(g, y)
\mathcal{L}(g, y)
\mathcal{L}(g, y)
\dots
\dots
\dots
n
x^{(1)}
y^{(1)}
f^1
\begin{aligned}
& W^1 \\
\end{aligned}
\begin{aligned}
& W^2 \\
\end{aligned}
\begin{aligned}
& W^L \\
\end{aligned}
f^2
f^L
g^{(1)}
\(\dots\)
f^2\left(\hspace{2cm}; \mathbf{W}^2\right)
f^1(\mathbf{x}^{(i)}; \mathbf{W}^1)
f^L\left(\dots \hspace{3.5cm}; \dots \mathbf{W}^L\right)
Forward pass: evaluate, given the current parameters
- the model outputs \(g^{(i)}\) =
- the loss incurred on the current data \(\mathcal{L}(g^{(i)}, y^{(i)})\)
- the training error \(J = \frac{1}{n} \sum_{i=1}^{n}\mathcal{L}(g^{(i)}, y^{(i)})\)
\mathcal{L}(g^{(1)}, y^{(1)})
\mathcal{L}(g, y)
\mathcal{L}(g^{(n)}, y^{(n)})
\underbrace{\quad \quad \quad \quad \quad }
\dots
\dots
\dots
n
linear combination
loss function
(nonlinear) activation
\dots
Outline
- Systematic feature transformations
-
Neural networks
- Terminology
- Design choices
Hidden layer activation function \(f\) choices
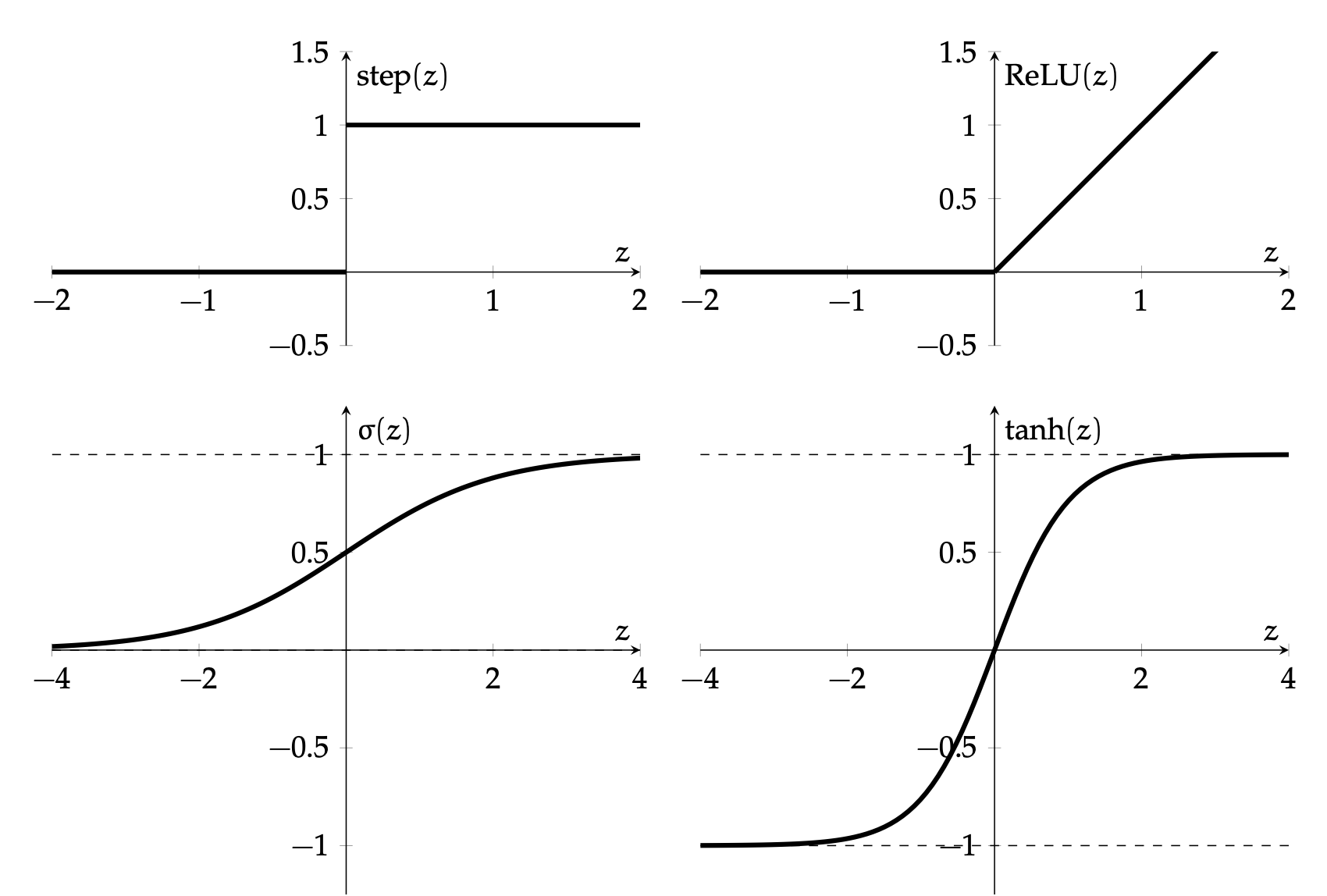
\(\sigma\) used to be the most popular
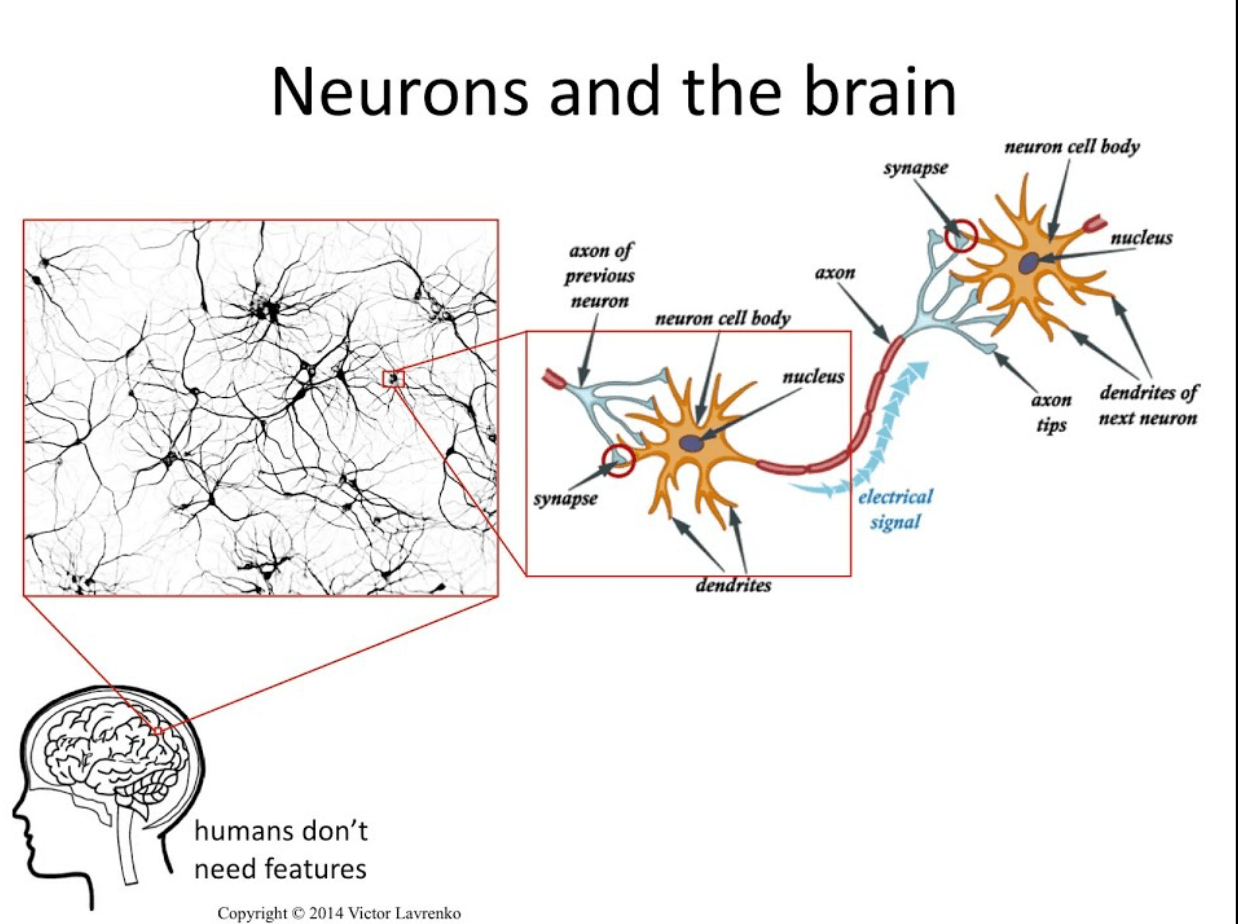
- firing rate of a neuron
- elegant gradient \(\sigma^{\prime}(z)=\sigma(z) \cdot(1-\sigma(z))\)
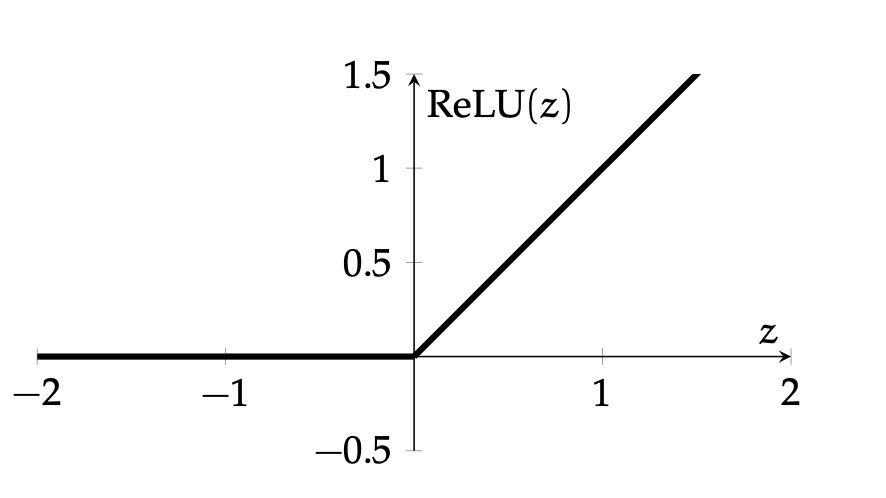
\operatorname{ReLU}(z)=\left\{\begin{array}{ll}
0 & \text { if } z<0 \\
z & \text { otherwise }
\end{array}\\
\\
\right.
=\max (0, z)
=\max (0, w^Tx + w_0)
very simple function form (so is the gradient).
nowadays, the default choice:
\frac{\partial \text{ReLU}(z)}{\partial z}=\left\{\begin{array}{lll}
0, & \text {if } z<0 \\
1, & \text{otherwise}
\end{array}\right.
compositions of ReLU(s) can be quite expressive

asymptotically, can approximate any continuous function arbitrarily well (for regression)
therefore can also approximate arbitrary decision boundaries (for classification)
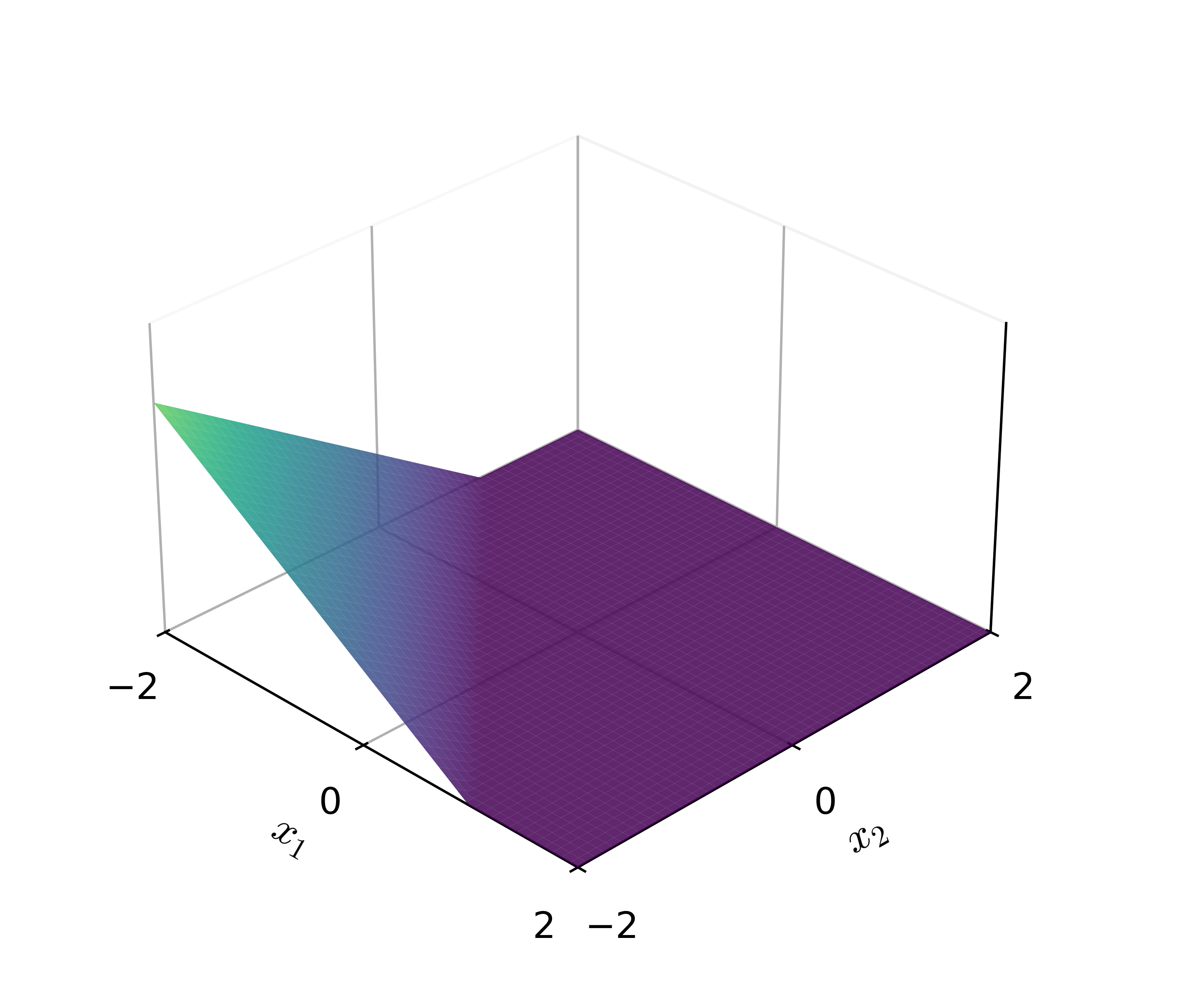
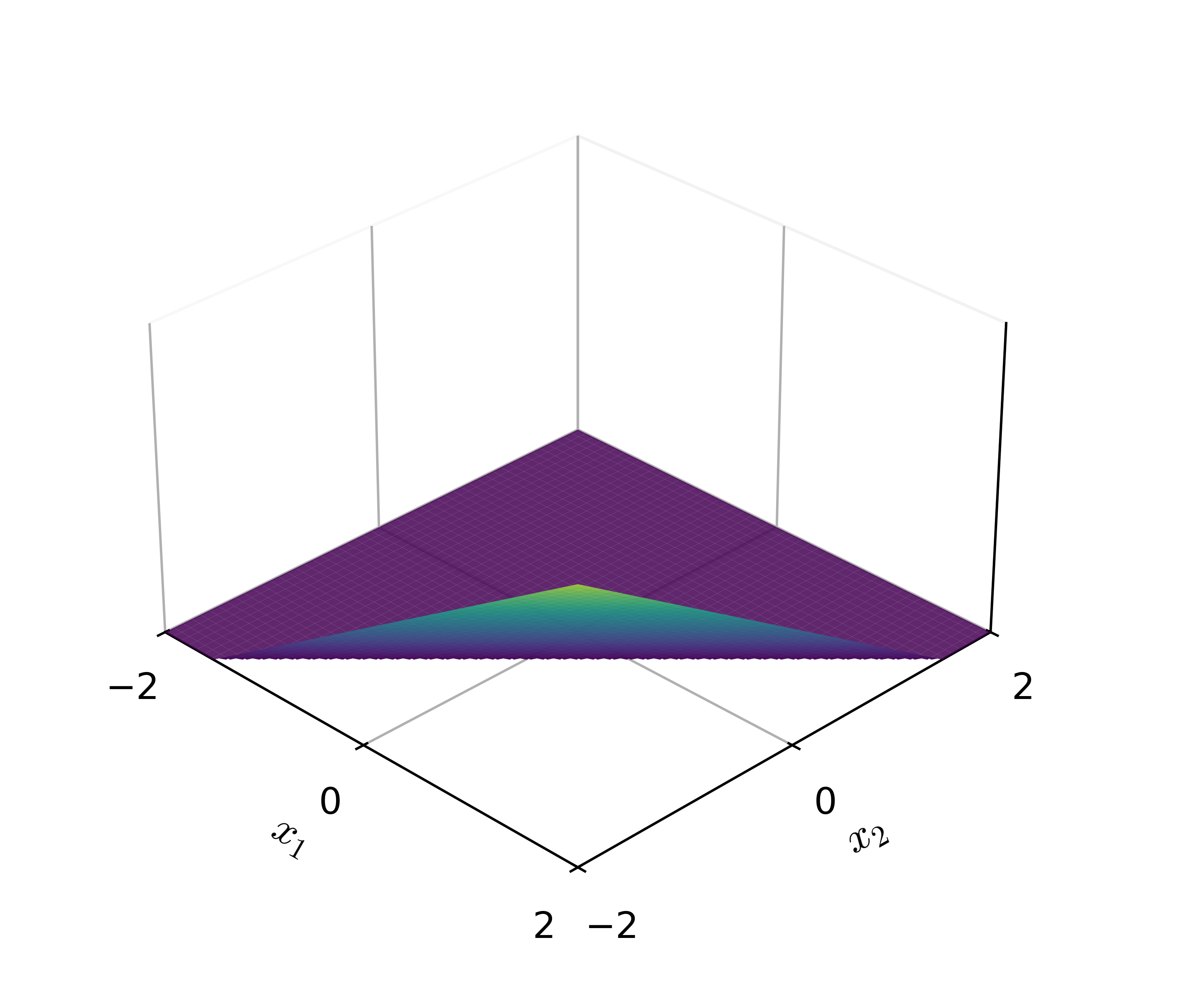
+
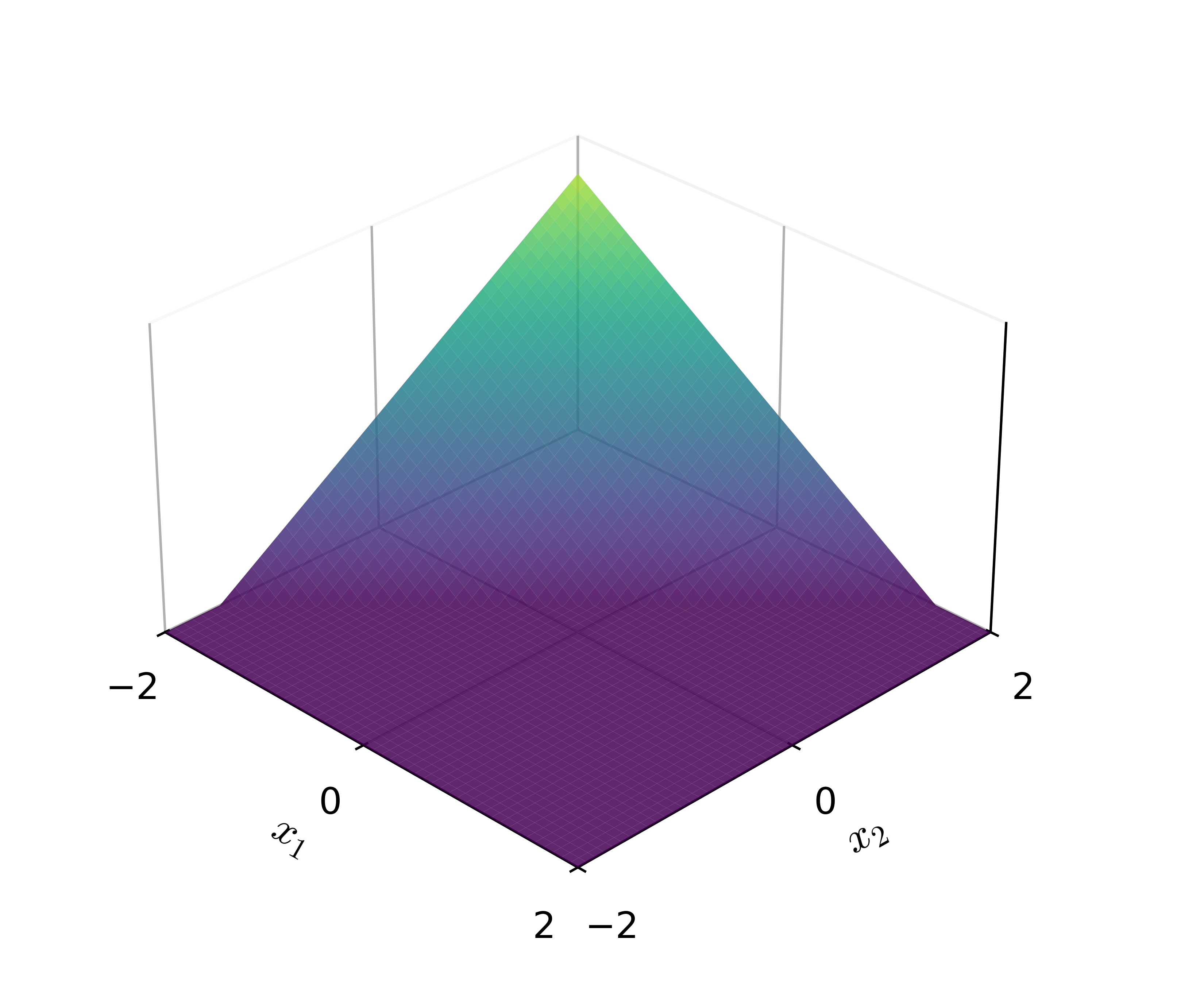
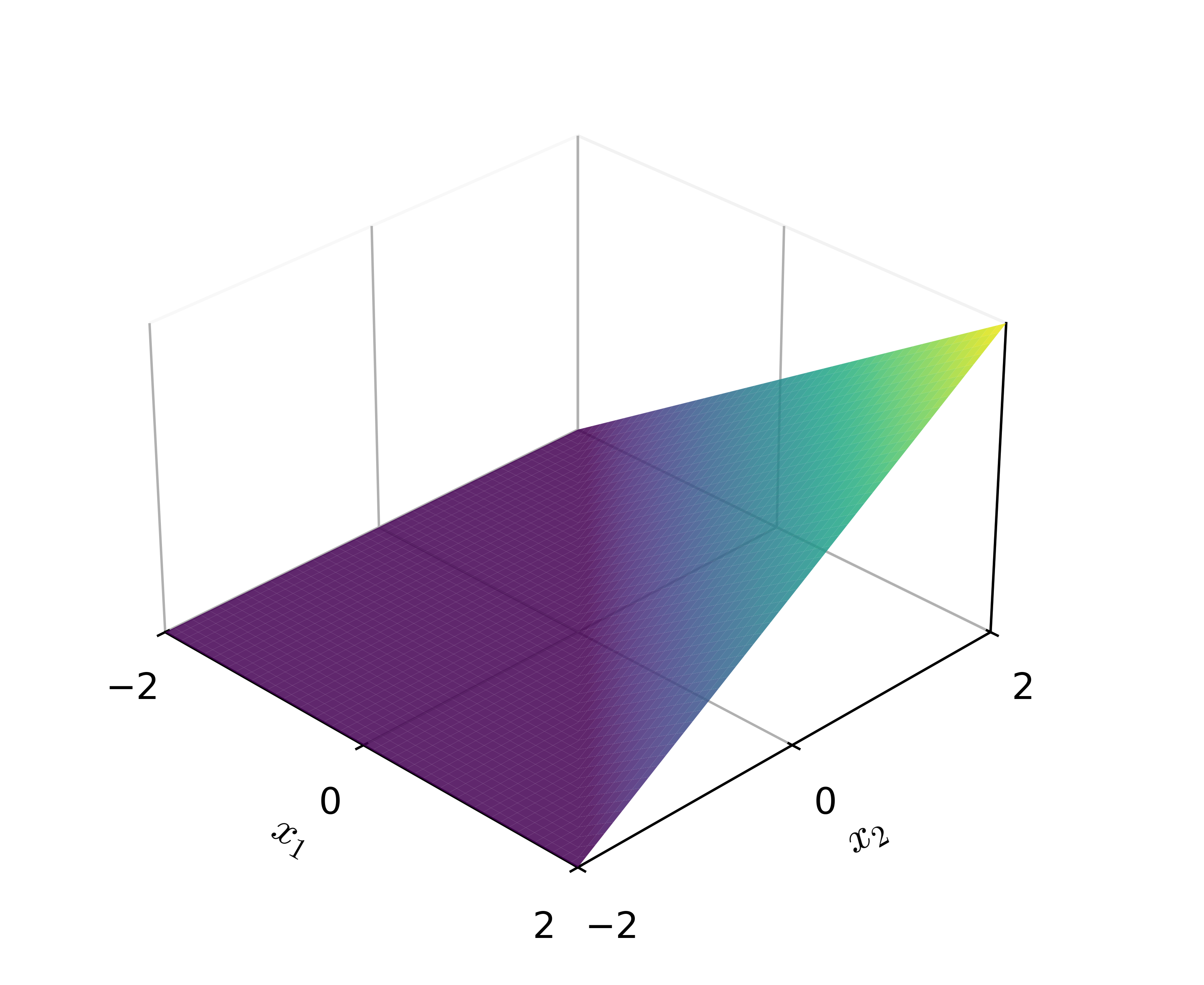
=
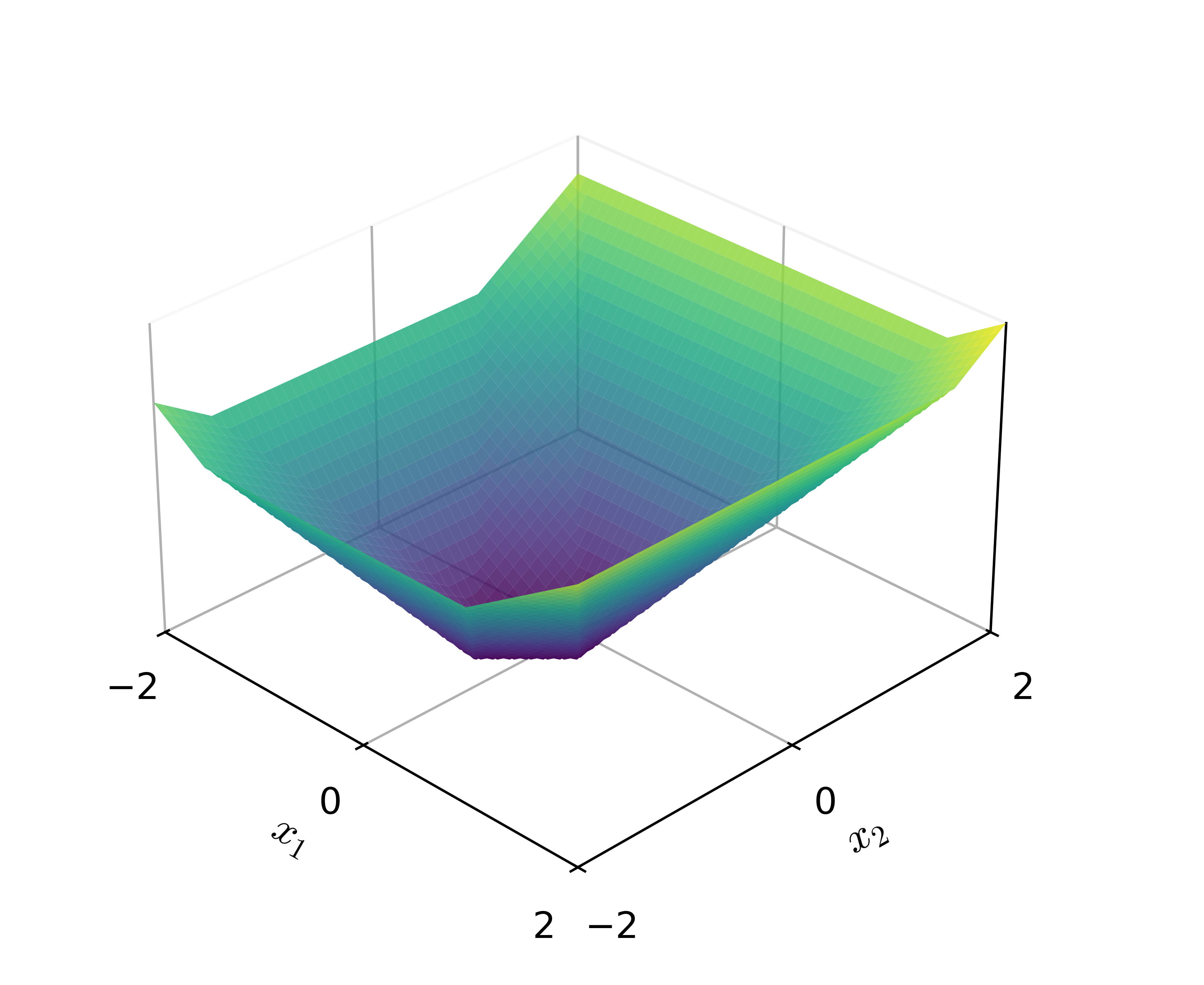
\(\text{ReLU}(-x_1 - x_2 - 1)\)
\(\text{ReLU}(x_1 - x_2 - 0.5)\)
\(\text{ReLU}(-x_1 + x_2 - 0.5)\)
\(\text{ReLU}(x_1 + x_2)\)
just 4 ReLU neurons already
carve out a non-trivial surface
compositions of ReLU(s) can be quite expressive

- Width: # of neurons in layers
- Depth: # of layers
- Typically, increasing either the width or depth (with non-linear activation) makes the model more expressive, but it also increases the risk of overfitting.
However, in the realm of neural networks, the precise nature of this relationship remains an active area of research—for example, phenomena like the double-descent curve and scaling laws
(The demo won't embed in PDF. But the direct link below works.)
output layer design choices
- # neurons, activation, and loss depend on the high-level goal.
- typically straightforward.
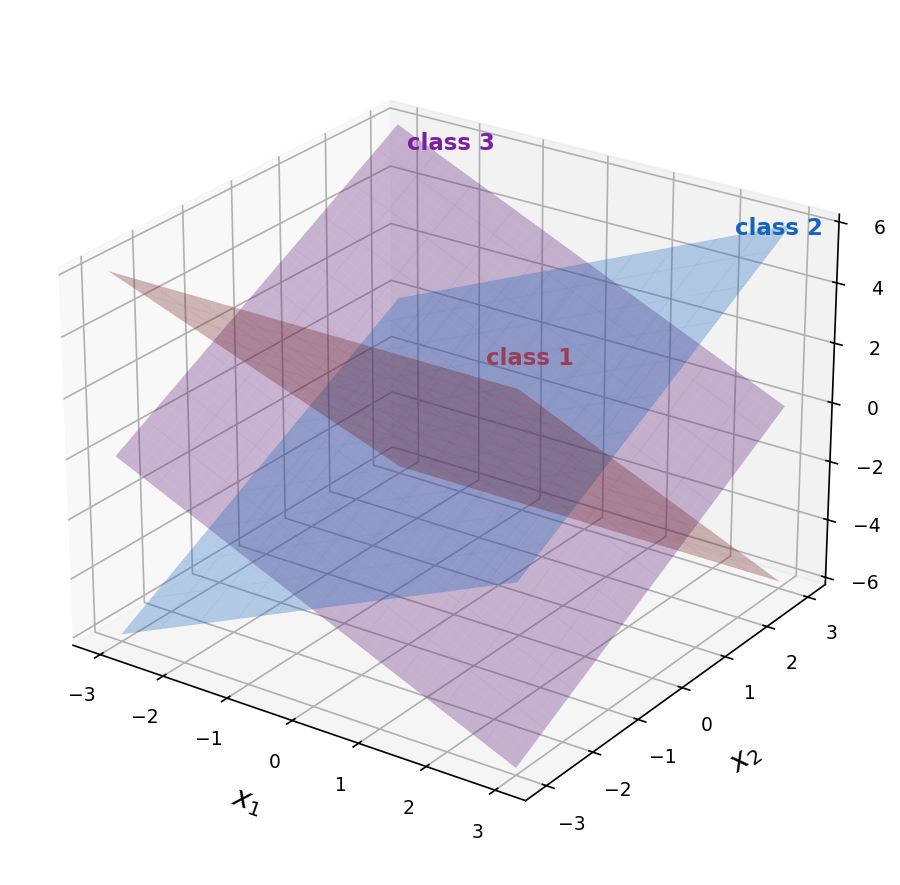
- Multi-class setup: if predict one and only one class out of \(K\) possibilities, then output layer: \(K\) neurons, softmax activation, cross-entropy loss
- For other multi-class settings, see hw/lab.
e.g., say \(K=5\) classes
input \(x\)
hidden layer(s)
\dots
output layer
\begin{bmatrix}
-1.0 \\ -0.5 \\ 0.0 \\ 0.5 \\ 1.0
\end{bmatrix}
\begin{bmatrix}
0.058 \\ 0.096 \\ 0.158 \\ 0.260 \\ 0.429
\end{bmatrix}
\operatorname{softmax}\left(z_j\right)\\=\frac{\exp \left(z_j\right)}{\sum_{i=1}^K \exp \left(z_i\right)}
Summary
Linear models are convenient but lack expressiveness for most real-world tasks.
A fixed non-linear feature transformation lets us use linear methods on complex problems, but designing features by hand gets tedious.
Neural networks automate feature learning: layers alternate parameterized linear maps with non-linear activations (typically ReLU).
For classification outputs, we apply sigmoid (binary) or softmax (multi-class).
Next time: How do we train neural networks? (gradient descent + backpropagation)
6.390 IntroML (Spring26) - Lecture 5 Features and Neural Networks I
By Shen Shen



