
































russtedrake PRO
Roboticist at MIT and TRI
Russ Tedrake
MIT AI and Autonomy Conference
April 5, 2023
"What's still hard for AI" by Kai-Fu Lee:
AI cannot create, conceptualize, or manage complex strategic planning.
AI cannot accomplish complex work that requires precise hand-eye coordination.
AI cannot deal with unknown and unstructured spaces, especially ones that it hasn’t observed.
AI cannot, unlike humans, feel or interact with empathy and compassion; therefore, it is unlikely that humans would opt for interacting with an apathetic robot for traditional communication services.
Kai-Fu's key axes of development:
http://personalrobotics.stanford.edu/
Key advance:
Levine*, Finn*, Darrel, Abbeel, JMLR 2016
OpenAI - Learning Dexterity
Reinforcement Learning (RL)?
"And then … BC methods started to get good. Really good. So good that our best manipulation system today mostly uses BC, with a sprinkle of Q learning on top to perform high-level action selection. Today, less than 20% of our research investments is on RL, and the research runway for BC-based methods feels more robust."
Andy Zeng's MIT CSL Seminar, April 4, 2022
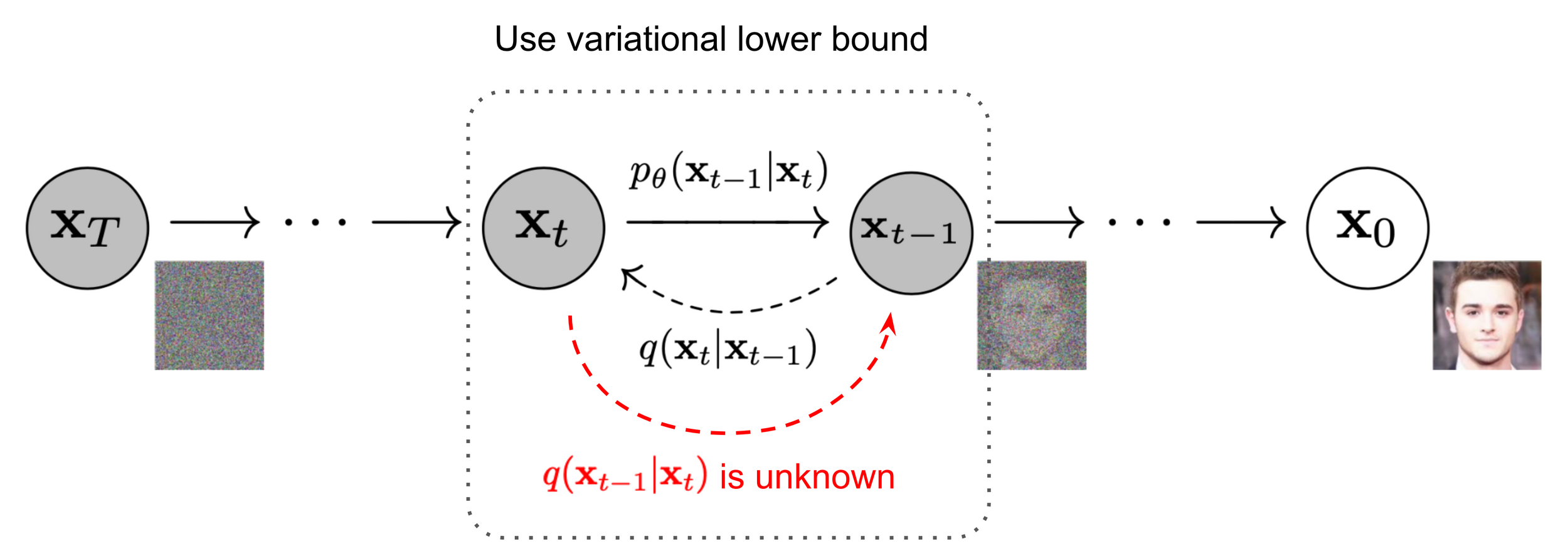
Image source: Ho et al. 2020
Andy Zeng's MIT CSL Seminar, April 4, 2022
Shortest Paths in Graphs of Convex Sets.
Tobia Marcucci, Jack Umenberger, Pablo Parrilo, Russ Tedrake.
Available at: https://arxiv.org/abs/2101.11565
Motion Planning around Obstacles with Convex Optimization.
Tobia Marcucci, Mark Petersen, David von Wrangel, Russ Tedrake.
Available at: https://arxiv.org/abs/2205.04422
start
goal
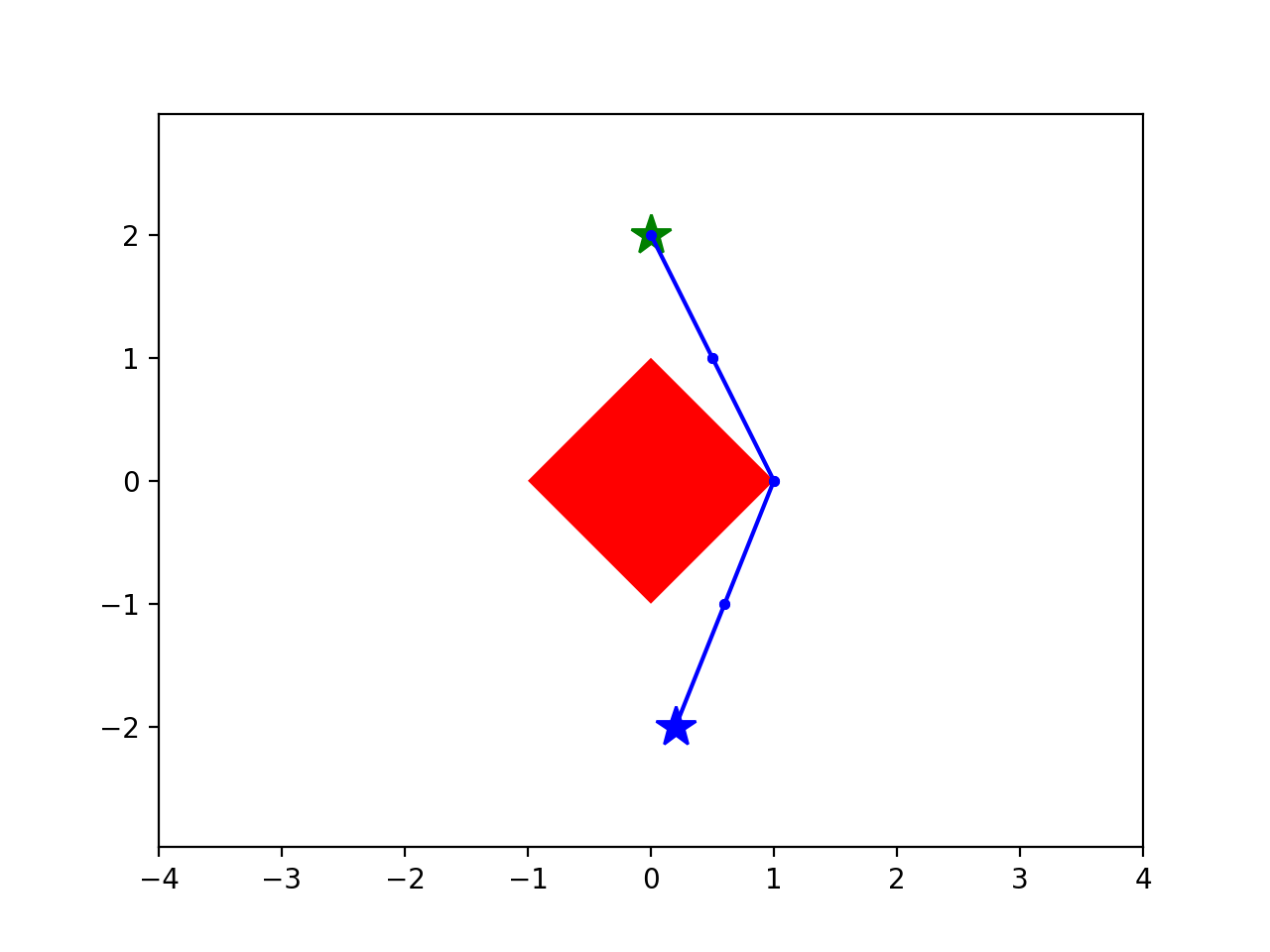
Two aspects of the motion planning problem:
start
goal
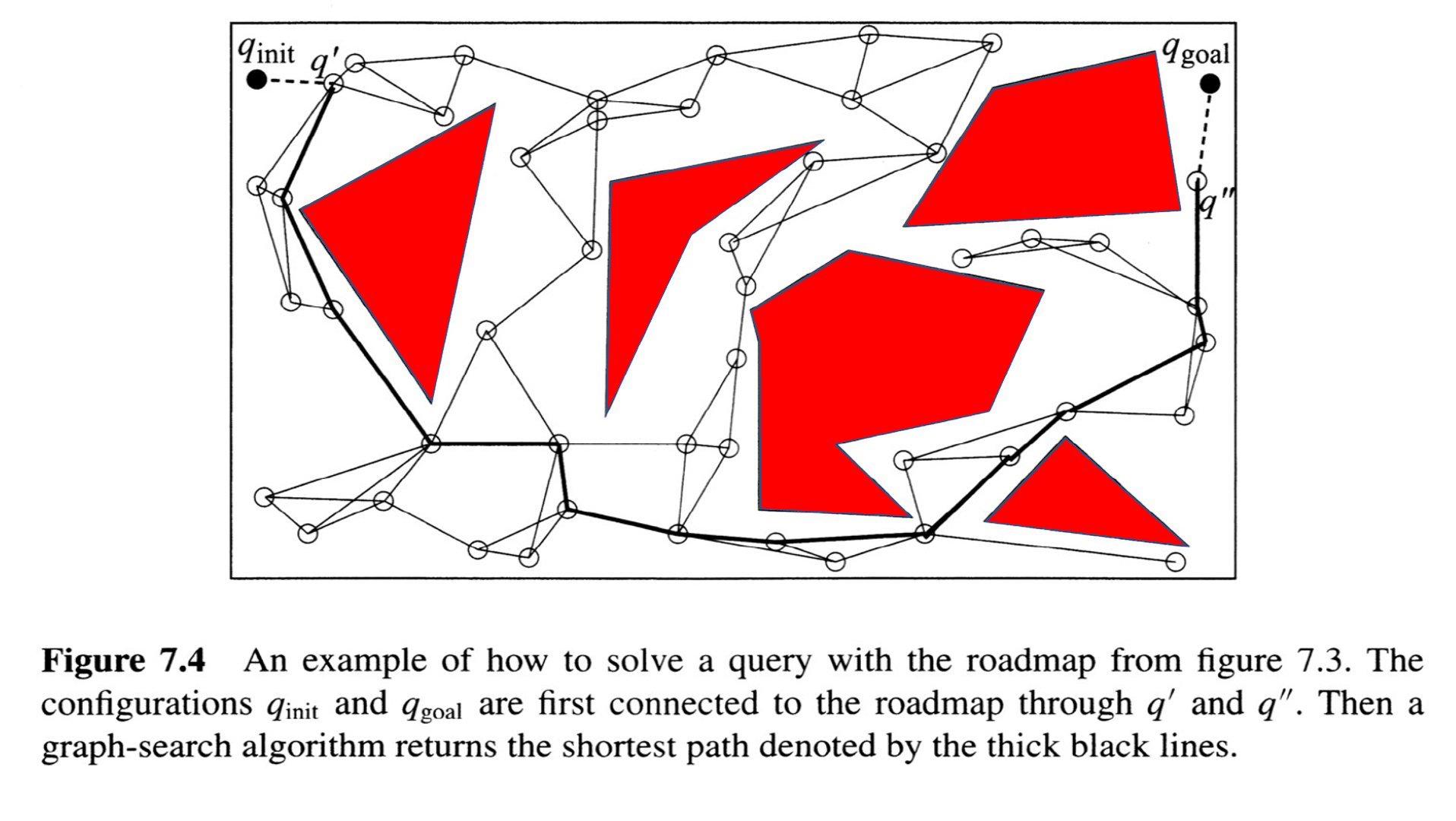
The Probabilistic Roadmap (PRM)
from Choset, Howie M., et al. Principles of robot motion: theory, algorithms, and implementation. MIT press, 2005.
Trajectory optimization
Sample-based planning
AI-style logical planning
Combinatorial optimization
Default playback at .25x
The Probabilistic Roadmap (PRM)
from Choset, Howie M., et al. Principles of robot motion: theory, algorithms, and implementation. MIT press, 2005.
Kinematic Trajectory Optimization
(for robot arms)
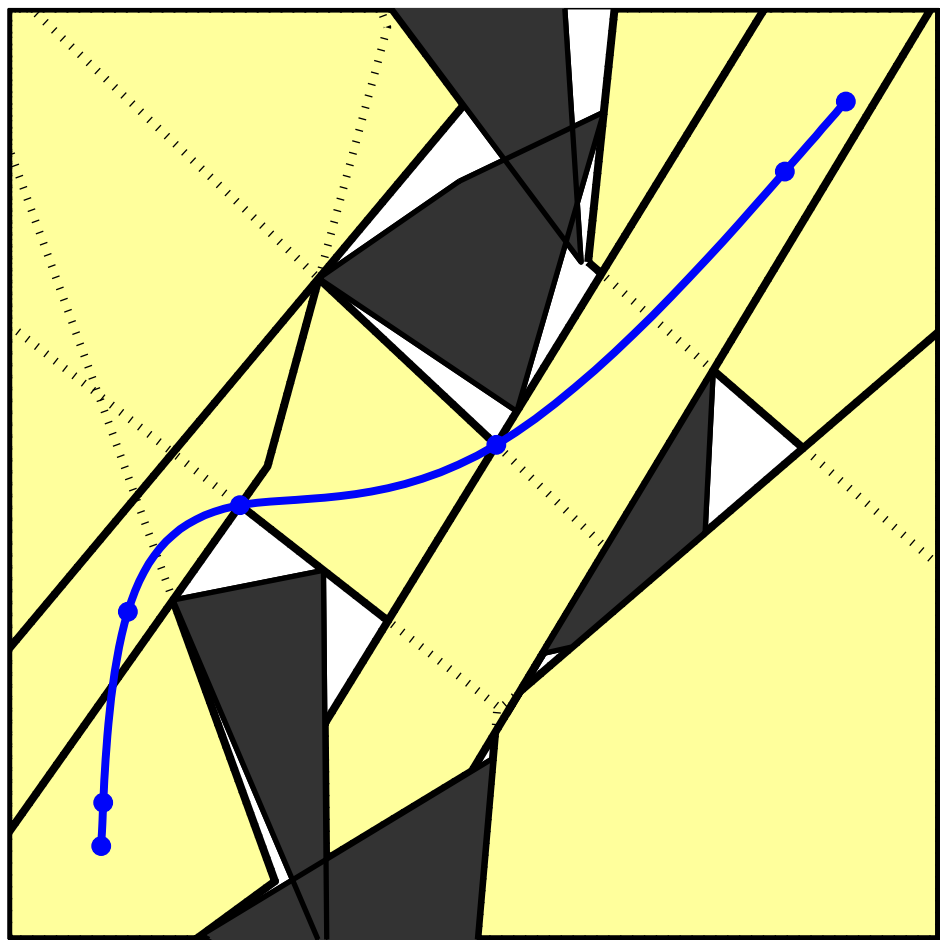
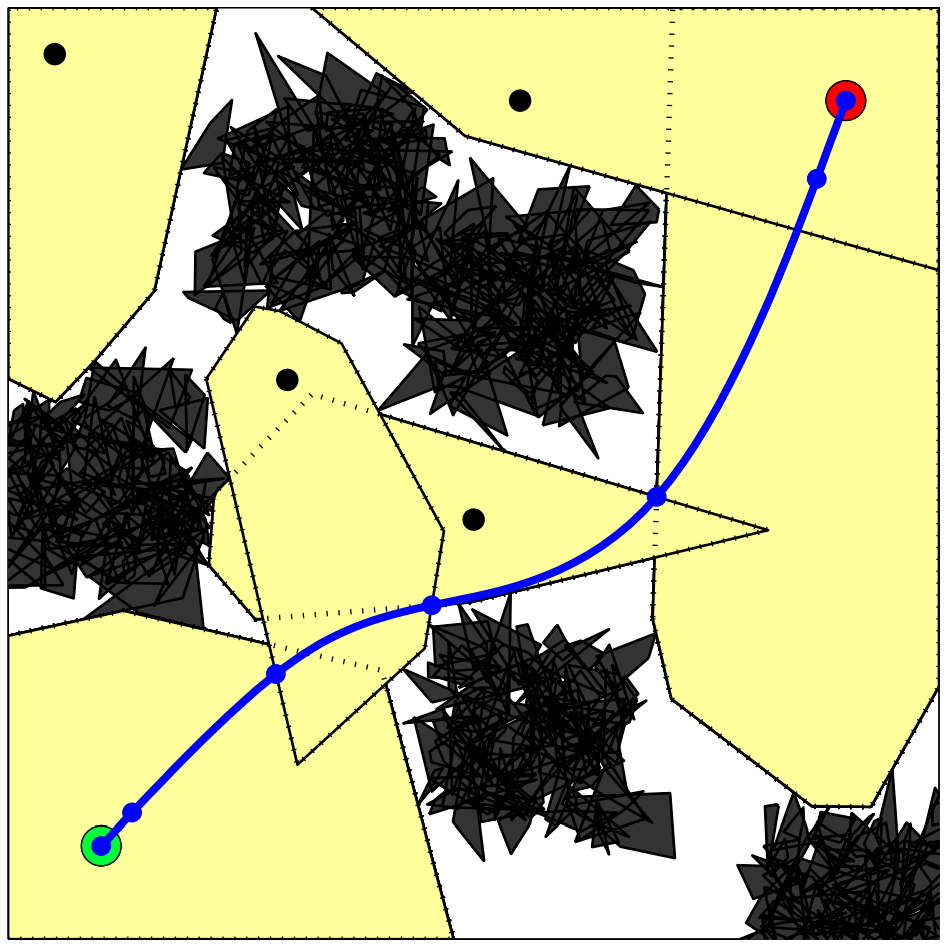
Note: The blue regions are not obstacles.
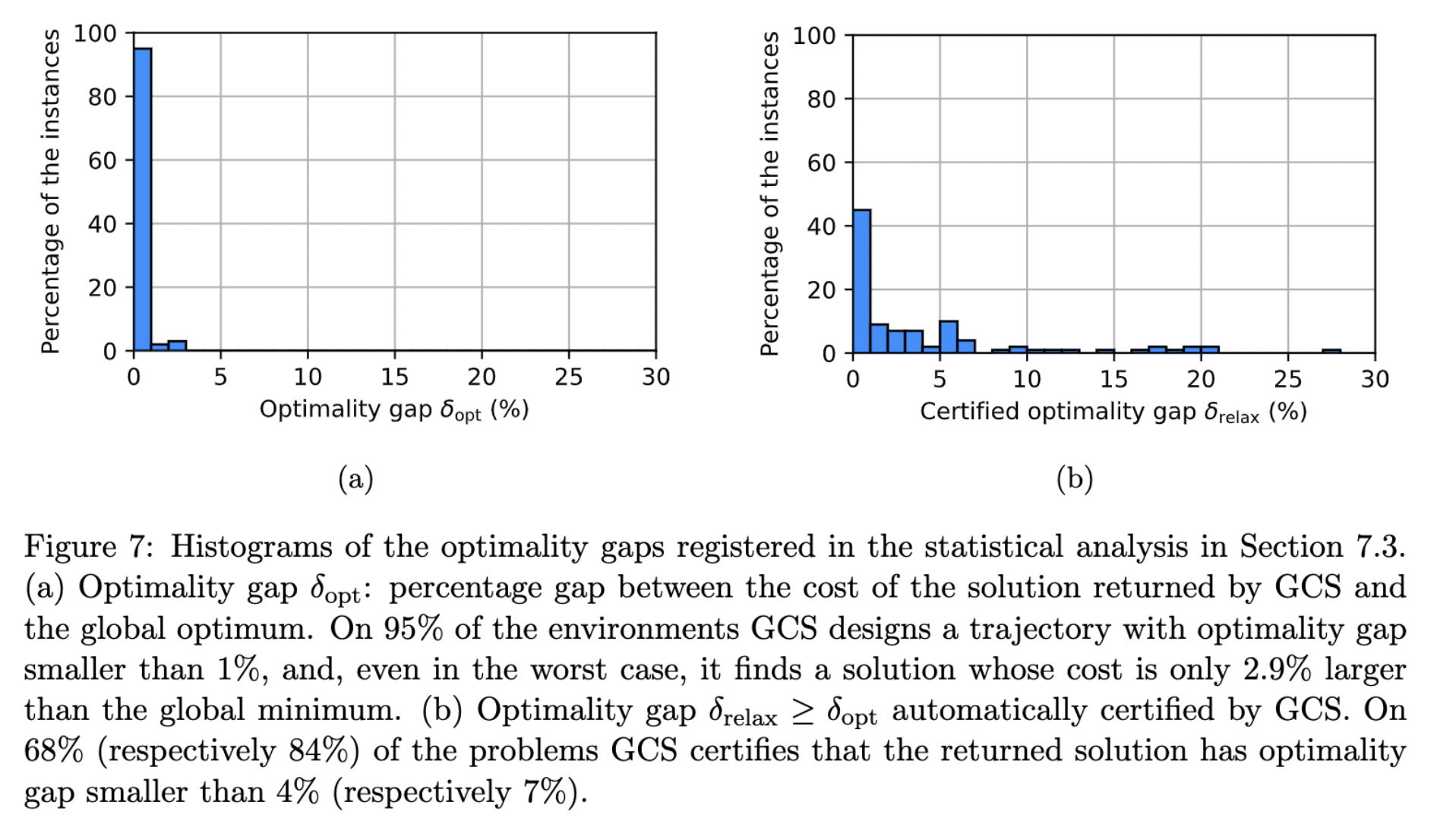
is the convex relaxation. (it's tight!)
Previous formulations were intractable; would have required \( 6.25 \times 10^6\) binaries.
| Previous best formulations | New formulation | |
|---|---|---|
| Lower Bound (from convex relaxation) |
7% of MICP | 80% of MICP |
Formulating motion planning with differential constraints as a Graph of Convex Sets (GCS)
+ time-rescaling
duration
path length
path "energy"
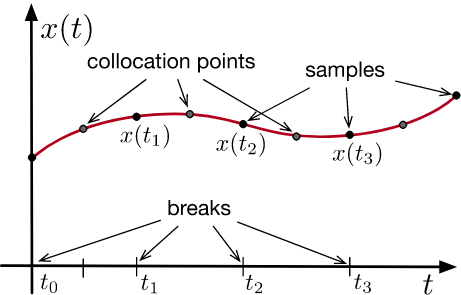
note: not just at samples
continuous derivatives
collision avoidance
velocity constraints
minimum distance
minimum time
Transcription to a mixed-integer convex program, but with a very tight convex relaxation.
IRIS (Fast approximate convex segmentation). Deits and Tedrake, 2014
This is version 0.1 of a new framework.
There is much more to do, for example:
by Tobia Marcucci in collaboration w/ Stephen Boyd
Shortest Paths in Graphs of Convex Sets.
Tobia Marcucci, Jack Umenberger, Pablo Parrilo, Russ Tedrake.
Available at: https://arxiv.org/abs/2101.11565
Motion Planning around Obstacles with Convex Optimization.
Tobia Marcucci, Mark Petersen, David von Wrangel, Russ Tedrake.
Available at: https://arxiv.org/abs/2205.04422
pip install drake
sudo apt install drakeAlready built in production build system at Amazon Robotics.
http://manipulation.mit.edu
http://underactuated.mit.edu
By russtedrake
CMU RI Seminar


