Caso de estudio: Boeing 737 MAX
(Parte 2)
IE3041 - Sistemas de Control 2
(Parte 2) Evaluación de propuesta
- Continuarán trabajando en los mismos equipos.
- Deberán [intentar] implementar su propuesta de la Parte 1 en un modelo representativo (irreal) del avión + MCAS.
- Deberán mostrar los resultados en MATLAB y explicar (los integrantes que no hayan presentado durante la Parte 1) su implementación, en un video corto de no más de 3 minutos.
(Parte 2) Evaluación de propuesta
- Deberán subir el video a la carpeta con recursos (se encuentra el enlace a la misma en Canvas y al final de esta presentación) bajo el mismo formato de nombre: secXX_grupoXX, antes del final del día (23:59) del domingo 26 de abril.
- Empleen como base el código ie3041_boeing_base.zip dentro de la carpeta de recursos.
(Parte 2) Evaluación de propuesta
- Deberán subir el video a la carpeta con recursos (se encuentra el enlace a la misma en Canvas y al final de esta presentación) bajo el mismo formato de nombre: secXX_grupoXX, antes del final del día (23:59) del domingo 26 de abril.
- Empleen como base el código ie3041_boeing_base.zip dentro de la carpeta de recursos.
NOTA
si su propuesta de implementación NO funcionó, explicar el porqué.
Algunos detalles preliminares
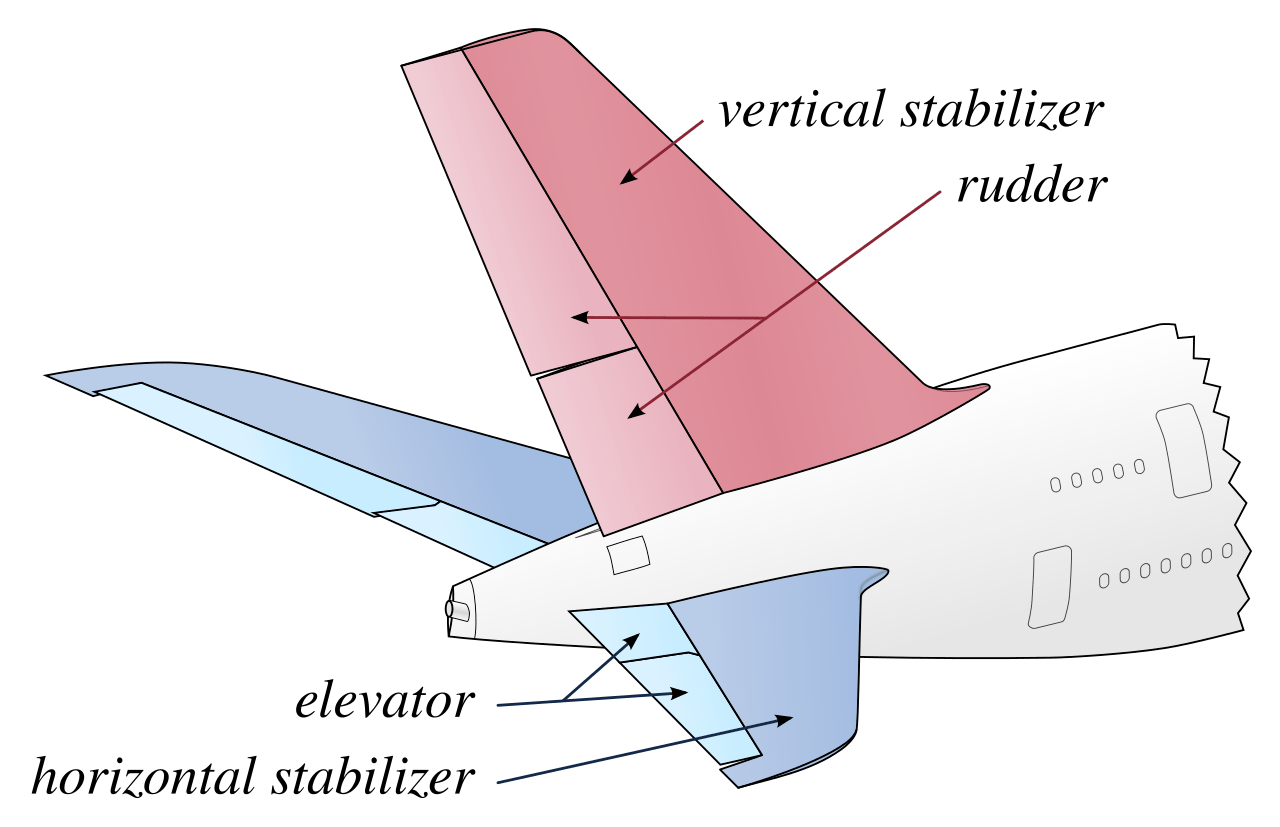
entradas de control
Algunos detalles preliminares
entradas de control
trim [condition] / trimming
\(\approx\) punto de operación/equilibrio
no es exactamente un punto de equilibrio porque un sistema "trimmed" puede aún estar en movimiento*
Modelo representativo
\mathbf{u}=\begin{bmatrix} \delta_e \\ u_\mathrm{trim} \end{bmatrix}
\(\coloneqq\) control [angular] del elevador
\(\coloneqq\) MCAS trim rate
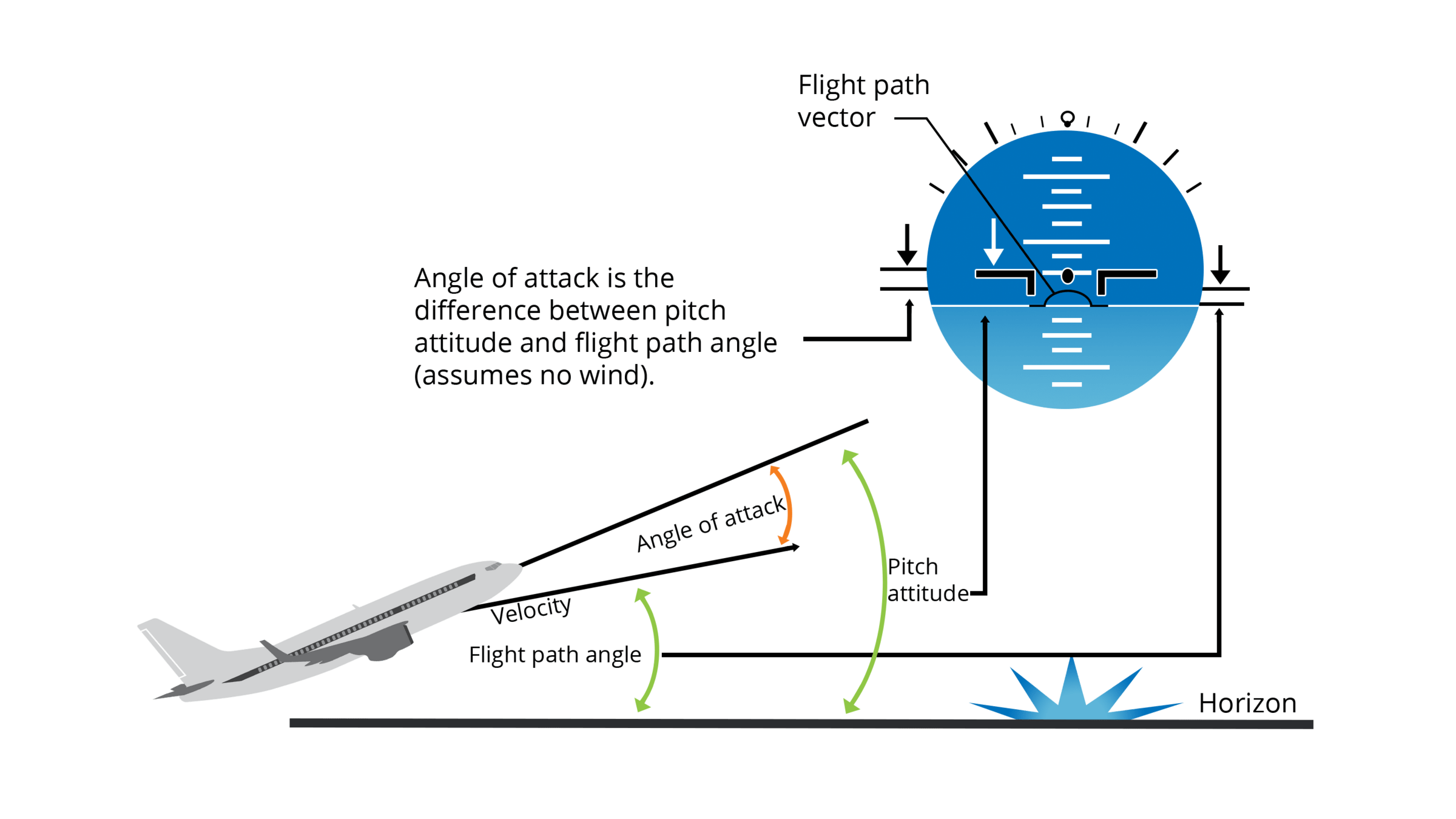
\mathbf{x}=\begin{bmatrix} \alpha \\ q \\ \theta \\ s \end{bmatrix}
\(\coloneqq\) ángulo de ataque (AoA)
\(\coloneqq\) pitch rate
\(\coloneqq\) ángulo de pitch
\(\coloneqq\) trim state para el estabilizador
Modelo representativo
\begin{bmatrix} \dot{\alpha} \\ \dot{q} \\ \dot{\theta} \\ \dot{s} \end{bmatrix}=
\begin{bmatrix}
a_\alpha \alpha + a_q q + a_s s + b_{\delta_e} \delta_e - c_\alpha \alpha^3 \\
m_\alpha \alpha + m_q q + m_s s + m_{\delta_e} \delta_e \\
q \\
u_\mathrm{trim}
\end{bmatrix}
\begin{bmatrix} y_{\alpha,1} \\ y_{\alpha,2} \\ y_\theta \\ y_q \end{bmatrix}=
\begin{bmatrix}
\alpha + \varepsilon(t) \\
\alpha \\
\theta \\
q
\end{bmatrix}
\(\coloneqq\) AoA sensor 1 (MCAS)
\(\coloneqq\) AoA sensor 2
Modelo representativo
\begin{bmatrix} y_{\alpha,1} \\ y_{\alpha,2} \\ y_\theta \\ y_q \end{bmatrix}=
\begin{bmatrix}
\alpha + \varepsilon(t) \\
\alpha \\
\theta \\
q
\end{bmatrix}
\mathrm{MCAS}\coloneqq f\left(y_{\alpha,1}\right)
se activa cuando el sensor de AoA 1 deja de funcionar
\begin{bmatrix} \dot{\alpha} \\ \dot{q} \\ \dot{\theta} \\ \dot{s} \end{bmatrix}=
\begin{bmatrix}
a_\alpha \alpha + a_q q + a_s s + b_{\delta_e} \delta_e - c_\alpha \alpha^3 \\
m_\alpha \alpha + m_q q + m_s s + m_{\delta_e} \delta_e \\
q \\
u_\mathrm{trim}
\end{bmatrix}
Modelo representativo
u_\mathrm{trim}=\mathrm{MCAS}\left(y_{\alpha,1}\right)=
\begin{cases}
\kappa_\mathrm{MCAS} & \text{ si } \quad y_{\alpha,1} > \text{umbral} \\
0 & \text{caso contrario}
\end{cases}
"Estrategia" básica del MCAS: cuando se sobrepase algún umbral de ángulo de ataque, automáticamente apuntar hacia abajo el avión para "compensar" los cambios en la planta de los motores más grandes.
Contenidos del código base
- casos3_base: archivo principal de simulación, puede modificarse sólo si se implementará un observador de estado.
- aircraftDynamics: NO modificar, se da como referencia para la dinámica del sistema.
- readSensors: genera las mediciones de los sensores instalados en el "avión". Puede modificarse para añadir sensores, si se requieren, pero NO puede "repararse" el error del sensor AOA 1.
- control: genera las señales de control para el elevador y el estabilizador horizontal, puede modificarse tanto se requiera.
- plotResults (no editable): muestra el dashboard de [gráficas de] resultados.
- animateAircraft2D (no editable): genera una animación del "avión" en 2D, da un aviso cuando este colisiona con el suelo.
IMPORTANTE
- La situación que se presenta por defecto en la simulación es la de la colisión del avión, por un fallo en el sensor AOA 1 empleado por el MCAS.
- Si quieren visualizar una corrida "correcta" para tenerla como referencia, basta con modificar el MCAS para que emplee las mediciones del sensor AOA 2 que se mantiene siempre "saludable".
- OJO: su implementación deberá estar fundamentada en la propuesta que hicieron en la Parte 1, al igual que los métodos y técnicas que hemos visto en clase, CUIDADO CON SOBRE-UTILIZAR IA.
(Parte 2) Material de apoyo y entregas

IE3041 - Caso Boeing 737 MAX - parte 2 (2026)
By Miguel Enrique Zea Arenales



