Generación de trayectorias y control cinemático
BE3027 - Robótica Médica

¿Qué tenemos hasta ahora?
(usando una analogía de sistemas de control)
\mathbf{q}
\mathcal{K}\left(\mathbf{q}\right) \subseteq {^B}\mathbf{T}_E(\mathbf{q})
cinemática directa
\dot{\mathbf{q}}
{^B}\mathcal{V}_E=\mathbf{J}(\mathbf{q})\dot{\mathbf{q}}
cinemática diferencial
\mathbf{q}
\mathcal{K}\left(\mathbf{q}\right) \subseteq {^B}\mathbf{T}_E(\mathbf{q})
cinemática directa
\dot{\mathbf{q}}
{^B}\mathcal{V}_E=\mathbf{J}(\mathbf{q})\dot{\mathbf{q}}
cinemática diferencial
\(\mathcal{K}\left(\mathbf{q}\right) + \mathbf{J}(\mathbf{q}) \sim\) función de transferencia
G(s)
\mathbf{q}_f=\mathcal{K}^{-1}\left(\mathbf{T}_d\right)
\mathbf{T}_d={^B}\mathbf{T}_E(\mathbf{q}_d)
tarea deseada
cinemática inversa
\mathbf{q}_f=\mathcal{K}^{-1}\left(\mathbf{T}_d\right)
\mathbf{T}_d={^B}\mathbf{T}_E(\mathbf{q}_d)
tarea deseada
cinemática inversa
\(\mathcal{K}^{-1}\left(\mathbf{T}_d\right)\sim\) controlador
C(s)
{^B}\mathbf{T}_E(\mathbf{q})
\ \mathbf{q}(t)
\mathbf{T}_d
\ \mathbf{q}_f
\ \mathbf{T}_0
\ \mathbf{q}_0
{^B}\mathbf{T}_E(\mathbf{q})
\ \mathbf{q}(t)
\mathbf{T}_d
\ \mathbf{q}_f
\ \mathbf{T}_0
\ \mathbf{q}_0
esto es en teoría lo que esperamos, sin embargo...
{^B}\mathbf{T}_E(\mathbf{q})
\ \mathbf{q}(t)
\mathbf{T}_d
\ \mathbf{q}_f
\ \mathbf{T}_0
\ \mathbf{q}_0
la cinemática inversa sólo nos da esto
{^B}\mathbf{T}_E(\mathbf{q})
\ \mathbf{q}(t)
\mathbf{T}_d
\ \mathbf{q}_f
\ \mathbf{T}_0
\ \mathbf{q}_0
¿Qué ocurre con este comportamiento?
El algoritmo de cinemática inversa
recordemos que el resultado de la cinemática inversa se obtiene mediante el algoritmo iterativo
\mathbf{q}_{k+1}=\mathbf{q}_k+\mathbf{J}^\dagger\left(\mathbf{q}_k\right)\mathbf{e}_k
El algoritmo de cinemática inversa
recordemos que el resultado de la cinemática inversa se obtiene mediante el algoritmo iterativo
\mathbf{q}_{k+1}=\mathbf{q}_k+\mathbf{J}^\dagger\left(\mathbf{q}_k\right)\mathbf{e}_k
entonces, si \(\mathbf{q}_k \to \mathbf{q}_f\) conforme aumentan las iteraciones, ¿Por qué no emplear los \(\mathbf{q}_k\) intermedios para el comportamiento transitorio?


porque el algoritmo NO converge como controlador, sino como método iterativo (discontinuo y "quebradizo")
este comportamiento predomina cuando la diferencia entre \(\mathbf{q}_0\) y \(\mathbf{q}_f\) es considerable
sin embargo, el comportamiento se hace "más continuo" conforme disminuye la diferencia entre \(\mathbf{q}_0\) y \(\mathbf{q}_f\)


Idea:

\mathbf{T}_0
\mathbf{T}_f
Idea: control cinemático

\mathbf{T}_0
\mathbf{T}_f
\mathbf{T}_1
\mathbf{T}_2
\mathbf{T}_3
\mathbf{T}_4
\cdots
\mathbf{T}_0
\mathbf{T}_f
Idea: control cinemático
\mathbf{T}_0
\mathbf{T}_f
\mathbf{T}_1
\mathbf{T}_2
\mathbf{T}_3
\mathbf{T}_4
\cdots
\mathbf{T}_0
\mathbf{T}_f
\mathbf{q}_1
\mathcal{K}^{-1}
\mathbf{q}_4
\mathcal{K}^{-1}
Idea: control cinemático
\mathbf{T}_0
\mathbf{T}_f
\mathbf{T}_1
\mathbf{T}_2
\mathbf{T}_3
\mathbf{T}_4
\cdots
\mathbf{T}_0
\mathbf{T}_f
puede ser un recorrido o una trayectoria
(más adelante...)
Control cinemático (por capas)
control cinemático
\mathcal{K}, \ \mathbf{J}, \ \mathcal{K}^{-1}
Control cinemático (por capas)
control cinemático
\mathcal{K}, \ \mathbf{J}, \ \mathcal{K}^{-1}
(servo) actuador 1
q_{1,\mathrm{ref}}(t) \text{ ó } \dot{q}_{1,\mathrm{ref}}(t)
Control cinemático (por capas)
control cinemático
\mathcal{K}, \ \mathbf{J}, \ \mathcal{K}^{-1}
(servo) actuador 1
(servo) actuador 2
\cdots
q_{1,\mathrm{ref}}(t) \text{ ó } \dot{q}_{1,\mathrm{ref}}(t)
q_{2,\mathrm{ref}}(t) \text{ ó } \dot{q}_{2,\mathrm{ref}}(t)
Control cinemático (por capas)
planificación de movimiento o generación de trayectorias
control cinemático
\mathcal{K}, \ \mathbf{J}, \ \mathcal{K}^{-1}
(servo) actuador 1
(servo) actuador 2
\cdots
q_{1,\mathrm{ref}}(t) \text{ ó } \dot{q}_{1,\mathrm{ref}}(t)
q_{2,\mathrm{ref}}(t) \text{ ó } \dot{q}_{2,\mathrm{ref}}(t)
\mathbf{q}_{\mathrm{ref}}(t) \text{ ó } \mathbf{T}_{\mathrm{ref}}(t)
Control cinemático (por capas)
planificación de movimiento o generación de trayectorias
control cinemático
autónoma (AI)
manual o asistida
\mathcal{K}, \ \mathbf{J}, \ \mathcal{K}^{-1}
(servo) actuador 1
(servo) actuador 2
\cdots
q_{1,\mathrm{ref}}(t) \text{ ó } \dot{q}_{1,\mathrm{ref}}(t)
q_{2,\mathrm{ref}}(t) \text{ ó } \dot{q}_{2,\mathrm{ref}}(t)
\mathbf{q}_{\mathrm{ref}}(t) \text{ ó } \mathbf{T}_{\mathrm{ref}}(t)
Recorridos vs trayectorias
Trayectoria = recorrido + especificación de tiempo
Recorridos vs trayectorias
Trayectoria = recorrido + especificación de tiempo
conjunto de puntos ordenados en el espacio, ya sea \(\mathcal{C}\) o \(\mathcal{T}\), que el manipulador debe seguir (puramente geométrico)
Recorridos vs trayectorias
Trayectoria = recorrido + especificación de tiempo
conjunto de puntos ordenados en el espacio, ya sea \(\mathcal{C}\) o \(\mathcal{T}\), que el manipulador debe seguir (puramente geométrico)
qué tan rápido ejecutará el robot el recorrido
(acorde a los límites de los actuadores)
Recorridos vs trayectorias
Trayectoria = recorrido + especificación de tiempo
conjunto de puntos ordenados en el espacio, ya sea \(\mathcal{C}\) o \(\mathcal{T}\), que el manipulador debe seguir (puramente geométrico)
qué tan rápido ejecutará el robot el recorrido
(acorde a los límites de los actuadores)
velocidades
aceleraciones
Recorridos vs trayectorias
Trayectoria = recorrido + especificación de tiempo
conjunto de puntos ordenados en el espacio, ya sea \(\mathcal{C}\) o \(\mathcal{T}\), que el manipulador debe seguir (puramente geométrico)
qué tan rápido ejecutará el robot el recorrido
(acorde a los límites de los actuadores)
velocidades
aceleraciones
dependiendo qué nos interese, tendremos distintas formas de generarlas
\mathbf{T}_0
\mathbf{T}_f
caso 1: sólo nos interesan las poses de inicio y final
(trayectoria | recorrido punto a punto)
\mathbf{T}_0
\mathbf{T}_f
caso 1: sólo nos interesan las poses de inicio y final
(trayectoria | recorrido punto a punto)
\xrightarrow{\mathcal{K}^{-1}} \mathbf{q}_0
\xrightarrow{\mathcal{K}^{-1}} \mathbf{q}_f
\mathbf{T}_0
\mathbf{T}_f
caso 1: sólo nos interesan las poses de inicio y final
(trayectoria | recorrido punto a punto)
\xrightarrow{\mathcal{K}^{-1}} \mathbf{q}_0
\xrightarrow{\mathcal{K}^{-1}} \mathbf{q}_f
interpolación en \(\mathcal{C}\)
la evolución de la configuración es suave pero no nos interesa lo que hace
\mathbf{T}_0
\mathbf{T}_f
caso 1: sólo nos interesan las poses de inicio y final
(trayectoria | recorrido punto a punto)
\xrightarrow{\mathcal{K}^{-1}} \mathbf{q}_0
\xrightarrow{\mathcal{K}^{-1}} \mathbf{q}_f
qtraj = jtraj(q0, qf, spec)- número de segmentos
- vector de tiempo
- velocidad inicial y final
\mathbf{T}_0
\mathbf{T}_f
caso 2: nos interesan todas las poses del movimiento
(trayectoria | recorrido continuo)
\mathbf{T}_0
\mathbf{T}_f
caso 2: nos interesan todas las poses del movimiento
(trayectoria | recorrido continuo)
\mathbf{T}_1
\mathbf{T}_\cdots
interpolación en \(\mathcal{T}\)
Ttraj = ctraj(T0, Tf, spec)\mathbf{T}_0
\mathbf{T}_f
caso 2: nos interesan todas las poses del movimiento
(trayectoria | recorrido continuo)
\mathbf{T}_1
\mathbf{T}_\cdots
- número de segmentos
- vector de \([0,1]\) generado con algún esquema de interpolación
Ttraj = ctraj(T0, Tf, spec)\mathbf{T}_0
\mathbf{T}_f
caso 2: nos interesan todas las poses del movimiento
(trayectoria | recorrido continuo)
\xrightarrow{\mathcal{K}^{-1}} \mathbf{q}_0
\xrightarrow{\mathcal{K}^{-1}} \mathbf{q}_f
IMPORTANTE:
debe regresarse al espacio \(\mathcal{C}\) antes de mandarse a los servos
\mathbf{T}_1
\mathbf{T}_\cdots
\xrightarrow{\mathcal{K}^{-1}} \mathbf{q}_1
\xrightarrow{\mathcal{K}^{-1}} \mathbf{q}_\cdots
qtraj = robot.ikine(Ttraj, ...);\mathbf{T}_0
\mathbf{T}_f
caso 2: nos interesan todas las poses del movimiento
(trayectoria | recorrido continuo)
\xrightarrow{\mathcal{K}^{-1}} \mathbf{q}_0
\xrightarrow{\mathcal{K}^{-1}} \mathbf{q}_f
IMPORTANTE:
debe regresarse al espacio \(\mathcal{C}\) antes de mandarse a los servos
\mathbf{T}_1
\mathbf{T}_\cdots
\xrightarrow{\mathcal{K}^{-1}} \mathbf{q}_1
\xrightarrow{\mathcal{K}^{-1}} \mathbf{q}_\cdots
>> be3027_clase8_ejemplos_trayectorias.m
Robótica médica y cirugía asistida por computadora
¿Qué tenemos hasta ahora?
\mathcal{K}:\mathcal{C}\to \mathcal{T}
{^B}\mathcal{V}_E=\mathbf{J}(\mathbf{q})\dot{\mathbf{q}}
\mathcal{K}^{-1}:\mathcal{T}\to \mathcal{C}
podemos hacer que el robot ejecute (cinemáticamente hablando) la tarea que necesitemos
\mathcal{K}:\mathcal{C}\to \mathcal{T}
{^B}\mathcal{V}_E=\mathbf{J}(\mathbf{q})\dot{\mathbf{q}}
\mathcal{K}^{-1}:\mathcal{T}\to \mathcal{C}
podemos hacer que el robot ejecute (cinemáticamente hablando) la tarea que necesitemos
dependerá de la aplicación
en nuestro caso...



Recordemos: tareas 4A
automation
autonomy
augmentation
assistance
robótica médica
Cirugía (robótica) asistida por computadora
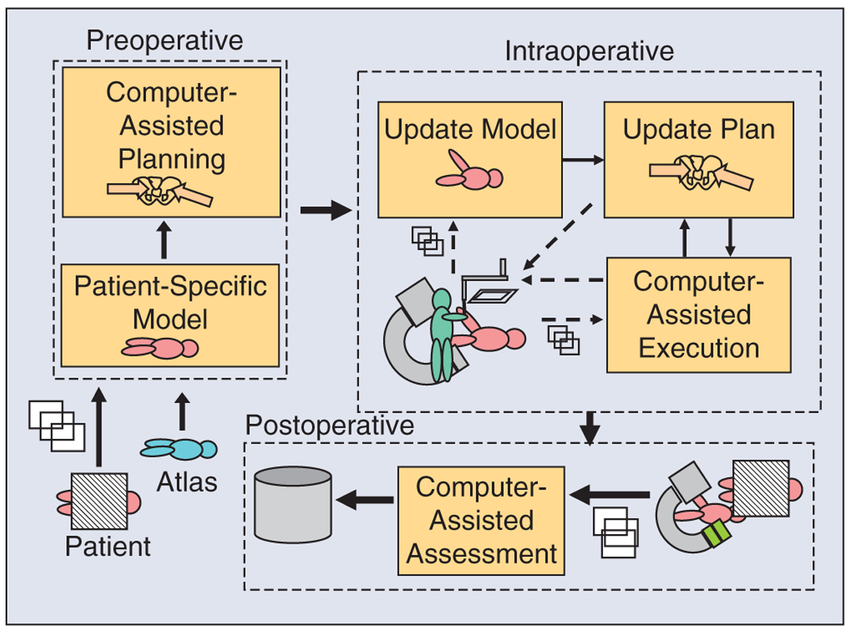
principalmente basadas en imágenes médicas
combinación de imágenes médicas con navegación y registro
Navegación


Navegación
Registro


aquí se da el principal/mayor aporte del robot
¿Qué tanto asiste el robot al cirujano? Depende del paradigma de control
Movimiento semi-autónomo
Movimiento pre-programado de forma interactiva por el cirujano, basado en imágenes médicas. Ej: inserción de agujas o instrumentos, trayectorias de herramientas de corte.

Movimiento semi-autónomo
Control teleoperado

El robot en el lado del paciente replica los movimientos registrados por la interfaz para el cirujano.
Hands-on compliant control
El cirujano recibe retroalimentación sobre la fuerza ejercida en el efector final del robot y viceversa.

Estos paradigmas no son mutuamente excluyentes ya que frecuentemente se usa una mezcla de los mismos.

Cirujano vs robot
Potencial de impacto

BE3027 - Lecture 8 (2025)
By Miguel Enrique Zea Arenales



